Материал: Lecture_notes_on_discipline_Meth
6
1.2 Системи координат
Для виводу зображення об'єкта на екран графічного пристрою необхідно вирішити дві основні задачі:
указати положення всіх точок об'єкта в просторі;
визначити положення їхніх образів на моніторі (спроектувати об'єкт на екран).
Для цього використовуються різні системи координат, які пов’язані між собою.
1.2.1 Системи координат для плоских зображень
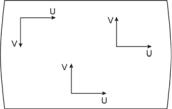
Система координат пристрою (device coordinate system (dcs))
визначає положення точки на екрані двома цілими числами (u, v), що дорівнюють числу пікселів (складається з горизонтальної осі u та вертикальної осі v, а початок відліку-довільний).
Рисунок 1.2 – Системи координат пристрою
Та сама точка може задаватися різними параметрами залежно від положення початку координат, напрямку осей і масштабу (ці параметри для різних графічних пристроїв установлюються довільно). Тому, апаратні координати в графічній програмі можуть вимагати зміни при зміні графічного пристрою.
Віртуальна система координат пристрою (virtual dcs) – фіксує точку відліку (зазвичай лівий нижній кут), напрямок і масштаб осей (параметри u та v змінюються від 0 до 1 ). Графічна програма передає віртуальні координати підпрограмі драйвера пристрою, яка перетворює її в координати конкретного пристрою.
6
7
1.2.2 Системи координат для роботи в 3D просторі
Зовнішня (світова) система координат (world coordinate system – wcs) – це опорна система, що використовується для опису об’єктів світу, що цікавлять нас.
Система координат моделі (model coordinate system) – дозволяє описати форму кожного об'єкта світу шляхом завдання координат характеристичних точок об'єкта стосовно самого себе; вона пов'язана з об'єктом і переміщується разом з ним.
Розташування та орієнтація будь-якого об'єкта задаються відносним положенням і орієнтацією модельної системи координат даного об'єкта відносно зовнішньої системи координат, які у свою чергу визначаються матрицею перетворення.
Система координат спостережника (viewing cs) – полегшує розрахунок проекції спостереження й використовується для проецювання 3D об'єктів або їхніх точок на екран монітора.
Система координат спостержника Xv Yv Zv будується так:
початок розташовується у точці, що розглядається;
вісь Zv спрямована з початку координат у точку зору;
вісь Yv паралельна вертикальної осі екрана;
вісь Xv визначається як векторний добуток перших двох.
Укомп'ютерній графіці використовується два види проекцій (перспективна і паралельна), які вимагають завдання двох точок: точки зору й точки спостереження.
Точка зору (viewpoint) – око спостерігача.
Точка спостереження (viewsite) – точка об'єкта, що визначає напрямок променя зору.
Напрямок спостереження – вектор, проведений від точки зору до цілі.
Уперспективній проекції всі точки розглянутого об'єкта з'єднуються із центром проекції, який зазвичай лежить на лінії, що з'єднує точку зору й ціль (у противному випадку проекція називається косокутною); точки перетинання цих ліній з екраном і утворять проекцію. Екран розташовується між точкою зору й цілі.
Упаралельній проекції лінії від всіх точок об'єкта проводяться
внапрямку спостерігача паралельно напрямку спостереження, а точки перетинання цих ліній з екраном формують проекцію (екран
7
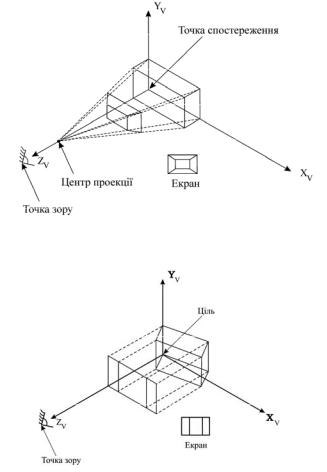
8
перпендикулярний напрямку проецювання тобто проекція ортогональна).
а)
б)
Рисунок 1.3 – Перспективна (а) і паралельна (б) проекції.
8
9
У більшості графічних бібліотек користувачеві доводиться задавати вектор вертикалі (up-vector), положення точки зору й точки спостереження у світових координатах. Після визначення системи координат спостережника і обчислення координат точок об'єктів, що цікавлять нас, обчислюють положення їхніх проекцій на екрані.
Для паралельної проекції координати точок дорівнюють відповідним координатам Xv та Yv точок об'єкта, а для перспективної
– вимагають перерахування по формулах:
X s L SZv X v
Ys L SZv Yv ,
де L – відстань між точкою спостереження й центром проекції; S – відстань між центром проекції й екраном.
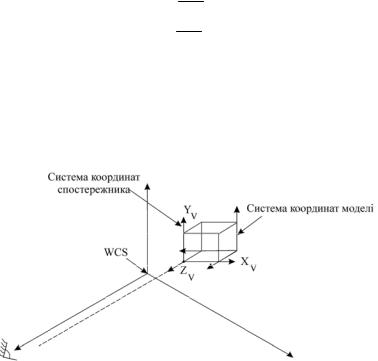
1.2.3 Перетворення між системами координат
Розглянуті системи координат зв'язані матрицями перетворення. Співвідношення систем координат можна проілюструвати в такий спосіб (див. рис.1.4):
Рисунок 1.4 – Співвідношення систем координат
Всі ці перетворення виконуються усередині графічної бібліотеки, а програміст тільки вказує відомості, що наведені на рис. 1.5 у дужках.
9

10
Рисунок 1.5 – Процедура розрахунку точок проекції з використанням матриць перетворення
1.3 Вікно та видовий екран
Світове вікно (world window)– встановлює яку частину "зовнішнього світу" слід намалювати, тобто відсікає невидиму частину простору.
Екранне вікно (графічне вікно) (screen windiw) – визначається як прямокутник, що лежить на екрані і заданий значеннями ширини и висоти в пікселях.
Об’єм, що переглядається – це видима частина простору, що залежить від типу проекції (для обмеження об’єму, що проглядається вводять поняття найближчої та найдальшої площини).
Видовий екран (viewport, демонстраційне вікно, порт перегляду, вікно виводу) – це область екрана, в якій відображається зображення, що проецюється.
Відображення складається з трансляції та масштабування, що враховують відстань між центром видового екрана і центром монітора, а також різницю розмірів світового вікна і видового екрана.
10