Материал: 3764
Федеральное агентство по образованию Государственное образовательное учреждение высшего профессионального образования «Воронежская государственная лесотехническая академия»
Электропривод и электромеханические системы
Методические указания к выполнению лабораторных работ
для студентов IV курса специальности 210200 (220301) – Автоматизация технологических процессов и производств (лесной комплекс)
Воронеж 2007
УДК 62-83
Поляков, С. И. Электропривод и электромеханические системы [Текст] : методические указания к выполнению лабораторных работ для студентов IV курса специальности 210200 (220301) – Автоматизация технологических процессов и производств (лесной комплекс) / С. И. Поляков ; ГОУ ВПО «ВГЛТА»
– Воронеж, 2007. – 24 с.
Печатается по решению редакционно-издательского совета ГОУ ВПО «ВГЛТА»
Рецензент канд. техн. наук, доц. А.В.Смольянинов
3
Введение
Дисциплина «Электропривод и электромеханические системы» является составной частью подготовки дипломированных специалистов в области автоматизации технологических и производственных процессов. Поэтому приведенные здесь схемы управления и методики расчета электромеханических объектов рассматриваются с точки зрения эксплуатации их в составе автоматизированных систем. Расчет и выбор электродвигателя, определение его передаточных функций, расчет измерителя рассогласования и потенциометрического преобразователя выполнен как составная часть расчета контура автоматического регулирования. Предложенные методики могут быть использованы как в курсовом проектировании для соответствующей дисциплины, так и при выполнении дипломного проекта.
Лабораторная работа №1
Изучение схем управления электроприводом транспортирующих и грузоподъемных устройств
1 Постановка задачи Транспортирующие и грузоподъемные устройства применяются во всех
отраслях лесного комплекса и деревообрабатывающей промышленности и даже на тех производствах, где технологическая автоматика в виде систем с обратной связью отсутствует.
Как правило, все указанные механизмы строятся на основе электропривода, чаще переменного тока, которым управляют различные технологические датчики, причем схемы электропривода являются типовыми.
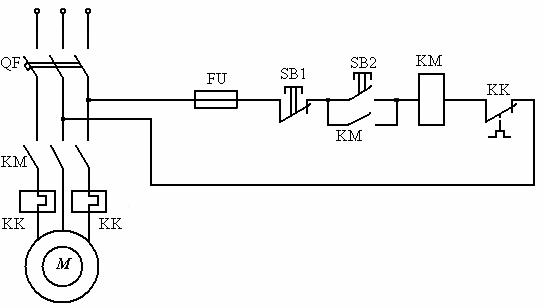
Рис. 1 Схема автоматического нереверсивного управления трехфазным короткозамкнутым двигателем
4
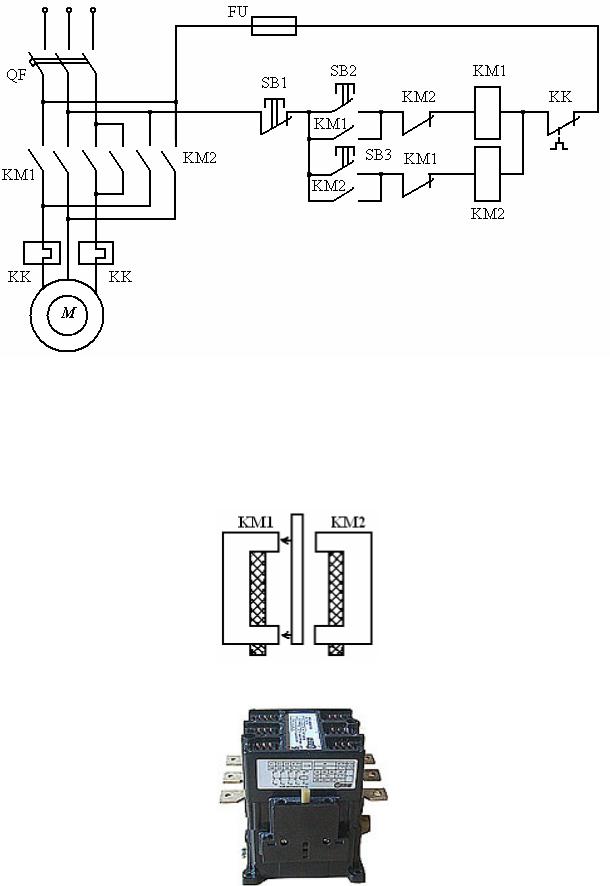
Рис. 2 Схема автоматического реверсивного управления трехфазным короткозамкнутым двигателем
КМ1 и КМ2 - магнитные пускатели (контакторы). Магнитный пускатель - малогабаритный контактор специального исполнения. Принцип действия реверсивного магнитного пускателя схематично показан на рис. 3, а внешний вид
– на рис. 4.
Рис. 3 Схема реверсивного магнитного пускателя
Рис. 4 Внешний вид магнитного пускателя ПМЕ 224/234 реверс
5
Пускатели предназначены для пуска, остановки и реверсирования трёхфазных асинхроных электродвигаелей с короткозамкнутым ротором, а также их защиты от перегрузок по току недопустимой продолжительности.
Как к элементу систем автоматического управления к электромагнитным пускателям предъявляются высокие требования по износостойкости. Классы изностостойкости: А, Б и В. Пускатели производятся в исполнениях с различной степенью защиты от прикосовений и внеших воздействий (IP00, IP20, IP40, IP54). Климатическое исполнение и категории размещения по ГОСТ
15150-69 и ГОСТ 15543.1-89.
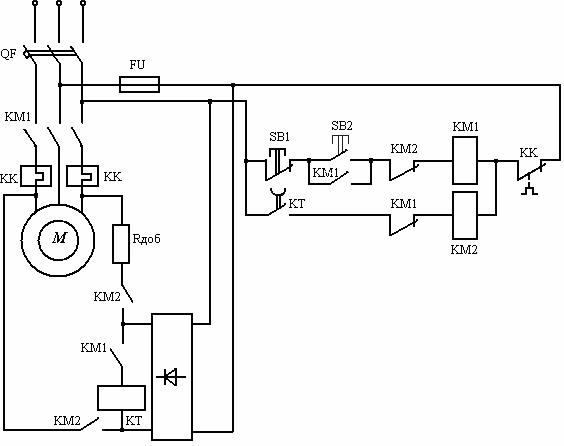
Рис. 5 Схема автоматического динамического торможения трехфазного короткозамкнутого двигателя
Торможение противовключением
Для автоматизации торможения противовключением на двигателе устанавливают реле контроля скорости (РКС).
Упругие элементы РКС настраиваются таким образом, чтобы контакты QS замыкались при скорости равной 10-15% от номинального значения: ω= (0,1÷0,15)ωн.