Материал: 3-19
Реферат
Дипломный проект.
Пояснительная записка: 110 с.; 33 рис.; 16 табл.; 7 источников.
Графическая документация: 1 л. формата А0, 11 л. формата А1.
КОМПЛЕКС, НАДЕЖНОСТЬ, ТЕХНОЛОГИЧНОСТЬ, АППАРАТУРА, ИЗМЕРИТЕЛЬ, ПРИНЦИПИАЛЬНЫЕ СХЕМЫ, ТЕХНОЛОГИЯ ПРОВЕРКИ, ПОИСК НЕИСПРАВНОСТИ, ТЕХНИКО-ЭКОНОМИЧЕСКОЕ ОБОСНОВАНИЕ, УСЛОВИЯ ТРУДА.
В разрабатываемом дипломном проекте решается задача разработки системы контроля для вертолетного автопилота АП-34Б Ми-171, которая позволит проконтролировать работу комплекса в лаборатории с помощью ЭВМ.
Исходными данными для дипломного проекта являются: руководство по технической эксплуатации вертолета Ми-171, описание комплекта АП-34Б , альбом электрических схем.
В дипломном проекте решаются также такие вопросы, как анализ надежности АП-34Б, разработка места оператора, анализ условий труда, мероприятия по защите от опасных факторов, оценка экономического эффекта от внедрения разрабатываемого установки.
СОДЕРЖАНИЕ
Стр.
Введение...................................................................................................................7
1 Описание объекта контроля ……….………………………………..............…8
1.1 Назначение автопилота и его основные данные....……………................8
1.2 Комплектность……………………………..........................…….........…....8
1.3 Основные технические данные.……….....................................................10
2 Общие сведенья об устройстве и принципе действия автопилота................10
2.1 Управление угловыми движениями вертолета………………....................….11
2.2 Управление высотой полета………………...............................................15
2.3 Управление скоростью полета……………...............................................15
2.4. Основные функциональные узлы и структурная схема автопилота.....17
2.5 Режим стабилизации...............................................................................…19
2.6. Режим управления......................................................................................26
3 Анализ надежности.................................... ………...........................................30
3.1 Количественный анализ надежности...........….........................................32
3.1.1 Группировка данных............................................................................33
3.1.2 Расчет эмпирических характеристик надежности............................33
3.2 Выбор теоретического закона распределения...........………........….......34
3.3 Определение параметров закона распределения…………......................35
3.4 Проверка правильности принятой гипотезы.....………….……..............36
3.5 Определение точности оценок параметров распределения ….…..........37
3.6 Построение графиков теоретического распределения.....…............…...38
3.7 Оценка уровня надежности................................................……...........….39
4 Разработка функциональной схемы КПА……………..............................…..40
4.1 Анализ существующего технического процесса………….............…….40
4.2 Разработка функциональной схемы КПА АП-34Б …………..........……41
4.2.1 Контроль отдельных агрегатов АП…………….…….....................43
4.2.2 Проверка блоков питания четырех каналов агрегата управления.............................................................................................................44
4.2.3 Проверка компенсационных датчиков крена и тангажа................44
4.2.4 Проверка пульта управления.............................................................45
4.2.5 Проверка блока усилителей...............................................................45
4.2.6 Проверка датчиков угловых скоростей и корректора высоты.......46
5 Разработка принципиальной схемы КПА АП-34Б..........................................47
5.1 Обоснование выбора элементной базы...................................................47
5.1.1 Выбор микроконтроллера................................................................47
5.1.2 Выбор модулей ЦАП и АЦП...........................................................53
5.1.3 Выбор трансформаторов..................................................................61
5.1.4 Выбор модуля ввода переменного напряжения............................63
5.1.5 Выбор элементов генерации трехфазного переменного тока......64
5.1.6 Выбор элементов для блока проверки корректора высоты..........68
5.1.7 Выбор элементной базы для поворотной платформы..................71
5.1.8 Выбор двигателей для имитации механического воздействия органов управления летчика.................................................................................74
5.1.9 Выбор CPU и программного обеспечения.....................................75
5.2 Описание принципа действия схемы принципиальной электрической КПА АП-34Б..........................................................................................................75
5.3 Технология проверки................................................................................80
6 Технико-экономическое обоснование КПА – АП-34Б...................................90
7 Обеспечение безопасности жизнедеятельности при проведении контроля комплекта вертолетного автопилота ап-34б.....................................................93
7.1 Условия труда оператора..........................................................................95
7.2 Санитарно-гигиенические требования....................................................95
7.3 Излучения и поля.......................................................................................98
7.4 Защита от поражения током.....................................................................99
7.5 Противопожарные мероприятия..............................................................99
7.7 Освещенность..........................................................................................107
Заключение...........................................................................................................109
Список использованных источников.................................................................110
Перечень используемых сокращеий
АГБ – Авиагоризонт
АЗС – Автомат защиты сети
АП – Автопилот
АУ – Агрегат управления
БП – Блок питания
БУ – Блок усилителей
ГВ – Гировертикаль
ДОС – Датчик обратной связи
ДУС – Датчик угловых скоростей
ИН – Индикатор нулевой
КВ – Корректор высоты
КДК – Компенсационный датчик крена
КДТ – Компенсационный датчик тангажа
КПУ – Контрольно-поверочная установка
ПУ – Пульт управления
РА – Рулевой агрегат
ВВЕДЕНИЕ
Вертолет Ми-171 является одной из самых удачных разработок российской вертолетостроительной школы. Этот вертолет представляет собой результат глубокой модернизации самого массового в мире вертолета Ми-8, общий налет которого насчитывает около 100 миллионов часов. Вертолет Ми-171 воплотил в себе все лучшие качества своего знаменитого предшественника и в то же время за счет внедрения современных технологий приобрел совершенно новые возможности. За короткий срок вертолет и его модификации были приняты в эксплуатацию более чем в тридцати странах мира. И с каждым годом круг стран-эксплуатантов вертолета Ми-171 расширяется.
Высокие летно-технические характеристики, надежность, простота эксплуатации и обслуживания, возможность применения в широком диапазоне условий эксплуатации, многофункциональность, приемлемая цена – вот те качества вертолета Ми-171, которые завоевали доверие операторов во всем мире.
Назначение:
-перевозка до 37 десантников/служебных пассажиров в полном снаряжении (на десантных сиденьях);
-перевозка до 26 пассажиров (на пассажирских креслах);
-транспортировка грузов массой до 4000 кг в грузовой кабине;
-транспортировка грузов массой до 4000 кг на внешней подвеске;
-поисково-спасательные операции;
-противопожарные работы;
-патрулирование;
-транспортировка до 12 раненых на носилках в сопровождении медицинского персонала;
-срочные медицинские операции в полевых условиях;
-выполнение работ по подъему, погрузке и разгрузке грузов в полете.
1 Описание объекта контроля
1.1 Назначение автопилота и его основные данные
Четырехканальный электрогидравлический автопилот АП-34Б серия 2 предназначен для улучшения пилотажных характеристик вертолетов различных типов на всех эксплуатационных режимах полета – от взлета до посадки, а так же для обеспечения:
-стабилизации угловых координат по трем осям;
-стабилизации заданной барометрической высоты в прямолинейном горизонтальном полете и на висении;
-стабилизации заданной воздушной скорости полета.
При этом обеспечивается выполнение эволюций с помощью обычных рычагов управления, допускаемых инструкцией по технике пилотирования.
1.2 Комплектность
В комплект автопилота АП-34Б серия 2 входят следующие агрегаты (рисонок 1):
пульт управления изд. 602.390.007.....................................................1 шт.
агрегат управления изд. 602.399.000..................................................1 шт.
компенсационный датчик изд. 602. 553. 002.....................................2 шт.
датчик угловой скорости направления изд. 1209К...........................1 шт.
датчик угловой скорости крена изд. 1209Г........................................1 шт.
датчик угловой скорости тангажа изд. 1209Е....................................1 шт.
блок усилителей изд. 1479В................................................................1 шт.
индикатор нулевой изд. ИН-4.............................................................1 шт.
корректор высоты изд. КВ-11..............................................................1 шт.
кнопка отключения изд. 512................................................................3 шт.
Автопилот взаимодействует со следующими изделиями, входящими в штатное оборудование вертолета:
-курсовыми системами КС и ГМК-1А; гировертикалью АГБ-3К или АГД-1 (сигналы, пропорциональные изменениям углов направления, крена и
тангажа, снимаются с сельсинов- датчиков, установленных в этих изделиях);
-корректором задатчиком высоты КЗВ;
-корректором задатчиком скорости приборной КЗСП;
-комбинированными рулевыми агрегатами КАУ-30Б и РА-60А, которые подключаются непосредственно к агрегату управления автопилота;
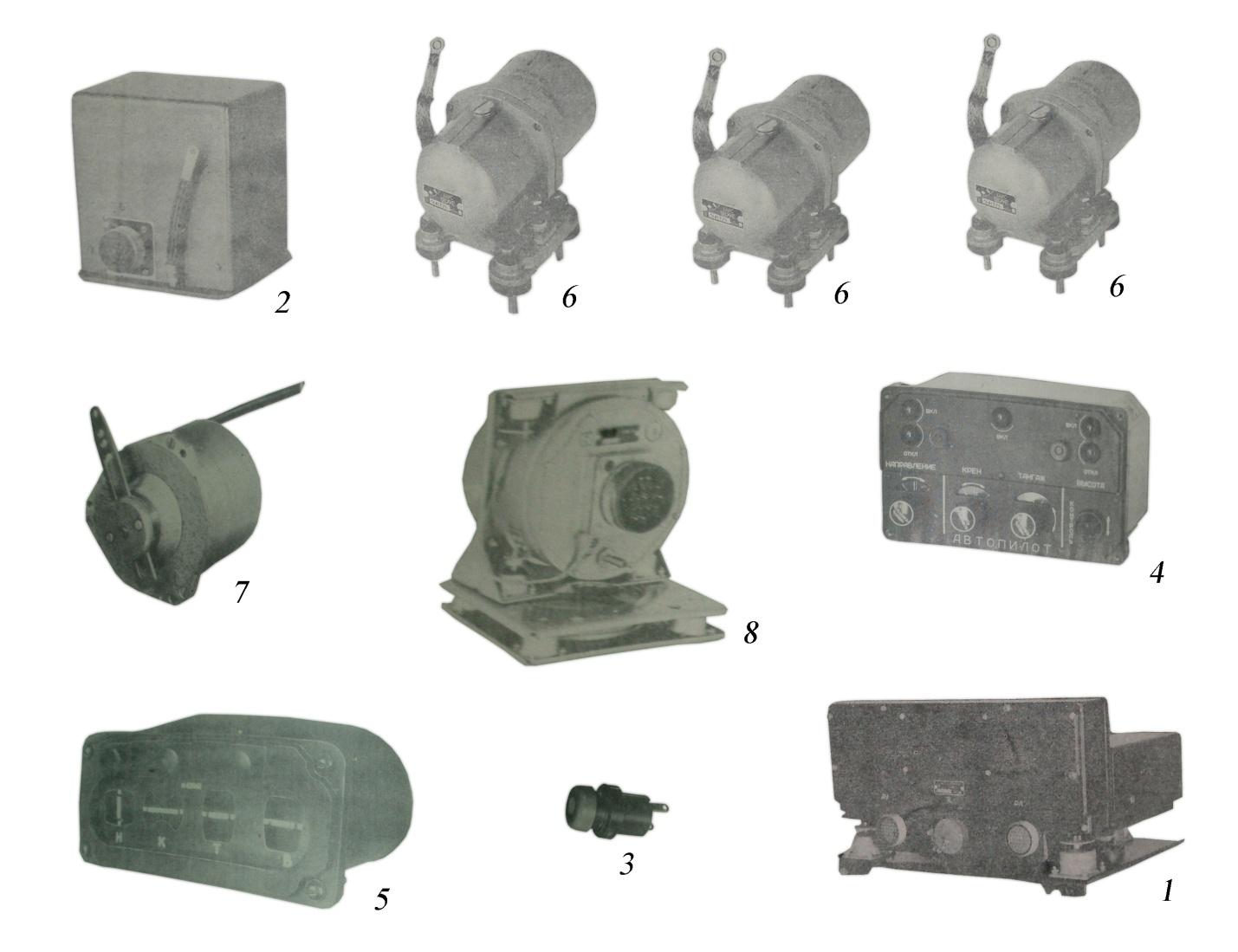
1- Агрегат управления; 2- блок усилителей; 3- кнопка отключения (3 шт.); 4- пульт управления; 5- индикатор нулевой; 6- датчик угловой скорости (крена, направления, тангажа); 7- компенсационный датчик (2 шт.); 8- корректор высоты КВ-11;
Рисунок 1- Комплектность автопилота
1.3 Основные технические данные
Точность выдерживания (в спокойной атмосфере при невмешательстве летчика в управление):
курса.................................................................................................. ± (1-2)º;
крен...........................................................................................................±1º;
тангажа.....................................................................................................±1º;
скорости...........................................................................................±15км/ч;
высоты..........................................± 6м, ± 12м при высотах свыше 1000м;
время готовности включения.............................................не более 2 мин;
температурный диапазон.................................................от -50ºС до 60ºС;
высотность........................................................................................10000м.
Источник электрического питания:
напряжение постоянного тока ...................................................27в ± 2,7В;
напряжение переменного трехфазного тока.............................36в ± 2В в частотах 400гц ± 8гц.
Потребление от источников питания:
по постоянному току ......................................................................... не более 2,2А;
по переменному току................................................... не более 3А в каждой фазе.
Вес (без источников питания и электропроводки).............не более 21 кг.