Материал: 2488
уравнения Риккати: K t ATK t K t A Q K t B B1T 2B B2T K t |
c |
|
1 |
2 |
|
граничнымусловием K tb F .
LQ задача дифференциальной игры, решаемая методом HJI. Ис-
пользуя функцию Гамильтона
H 0,5xTQx 0,5uTu 0,5 2vTv T Ax T B1u T B2v,
H-минимизирующее |
управление |
|
u~ x, B1T t ; H-максими- |
||
зирующее управление |
~ |
x, |
2 |
T |
t , получим следующую сим- |
v |
|
B2 |
|||
метричную форму HJI PDE:
J t=H x,u~ x, xJ ,v~ x, xJ , xJ =
0,5xTQx 0,5 xJ T B1B1T xJ+0,5 2 xJ T B2B2T xJ +0,5 xJ T Ax+0,5xT AT xJ;
Jx,tb =0,5xT Fx.
Сучетом граничных условий и PDE можно принять следующий
вид целевой функции: J x, t 0,5xT K t x с K tb F . Симметричная положительно-определенная n n матричная функция K t остается для t [ta, tb ). Разделенная форма HJI PDE:
0 0,5xT K t Q K t B1 B1T K t 2K t B1 B2T K t K t A AT K t x.
Так как x Rn независимый аргумент целевой функции J x,t , PDE удовлетворяются, если и только если матричная сумма в квадратных скобках обнуляется. Итак, следующий оптимальный закон управления получен для задачи дифференциальных игр:
u x t B1T K t x t ;v x t 2B2T K t x t ,
где симметричная, положительно-определенная n n матрица K t решение матричного дифференциального уравнения Риккати:
K t AT K t K t A K t B1 B1T K t 2K t B1 B2T K t Q
с граничным условием K tb F .
H -управление с помощью дифференциальных игр. Рассмотрим задачу H управления с «полной информацией» для LTI систем:
x t Ax t B1w t B2u t ;
z t C1x t D11w t D12u t .
181

Найдем такое LTI-управление u t Gx t , что H -норма отношения вектора возмущений w к вектору выходных сигналов z ограни-
чена значением |
0: |
sup |
|
|
|
|
z |
|
|
|
|
|
2 |
|
|
|
|
Tzw |
|
|
|
|
. Норма, например, |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
2 |
|
|
w |
|
|
|
2 |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
w L 0, ; |
|
w |
1 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 определяется как |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,5 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. Должны выполняться ус- |
||||||||||||
|
w |
w |
zT t z t dt |
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
ловия корректности: 1) A,B2 |
стабилизируемая; 2) A,C1 обна- |
|||||||||||||||||||||||||||||||
руживаемая; 3) |
D12T D12 |
обратимая; |
4) |
|
|
|
D11 достаточно мала: |
|||||||||||||||||||||||||
|
D11 , где |
D11 максимальное собственное значение D11. |
||||||||||||||||||||||||||||||
Постановка задачи дифференциальных игр. Эта H -задача экви-
валентна следующей задаче дифференциальных игр: для LTI системы
|
x t Ax t B1w t B2u t ; |
|
|
z t C1x t D11w t D12u t , |
|
с начальным |
состоянием x 0 xa |
найти такое LTI-управление |
u t Gx t , |
|
|
что функционал качества |
J u,w zT t z t 2wT t wt dt |
|
|
|
0 |
минимизируется управлением u и максимизируется w.
Для анализа этой задачи дифференциальных игр на бесконечном интервале введем обозначения:
i w u ;B B1 |
B2 ;D1* D11 |
|
|
D11T D11 2I |
D11T D12 |
||
|
|
||||||
D12 ;R |
D12T D11 |
D12T |
. |
||||
|
|
|
|
|
D12 |
||
Функция Гамильтона задачи:
H=0,5zT z 0,5 2wT w+ T x=0,5 C1x+D1*i T C1x+D1*i 0,5 2wTw+ T Ax+
T Bi=0,5xTC1TC1x+0,5xTC1T D1*i+0,5iT D1T*C1x+0,5iT D1T*D1*i 0,5 2wT w+
0,5 T Ax+0,5xT AT +0,5 T Bi+0,5iT BT =0,5xTC1TC1x+0,5xTC1T D1*i+
0,5iT D1T*C1x+0,5iT Ri+0,5 T Ax+0,5xT AT 0,5 T Bi+0,5iT BT =
0,5i+R 1 BT +D1T*C1x R i+R 1 BT +D1T*C1x +0,5xTC1TC1x+0,5 T Ax+0,5xT AT 0,5 BT +D1T*C1x T R 1 BT +D1T*C1x .
По предположению, D11T D11 2I отрицательно- и D12T D12 по- ложительно-определенные. Поэтому гамильтониан имеет равновесие
182
Нэша при i R 1(BT D1T*C1x), где он достигает значения
2H i xTC1TC1x T Ax xT AT BT D1T*C1x T R 1 BT D1T*C1x .
Используя t Kx t с симметрической n n матрицей K, полу-
чим i R 1 BT K D1T*C1 x и
H i 0,5xT C1TC1 KA AT K BT K D1T*C1 T R 1 BT K D1T*C1 x0,5xT (C1TC1 C1T D1*R 1D1T*C1 KBR 1BT K+K A BR 1D1*C1 + A BR 1D1*C1 T K)x.
Для LTI задачи дифференциальных игр с бесконечным интервалом времени функция Гамильтона устанавливается равной нулю выбором K, удовлетворяющим алгебраическому уравнению Риккати:
0 AT K KA KSK Q ,
где A A BR 1D1C1;S BR 1BT ;Q C1TC1 C1T D1*R 1D1T*C1, причем матрица A SK устойчивая.
Рассмотренные методы многокритериальной оптимизации могут быть применены в интерактивных интеллектуальных информационных системах поддержки принятия решений. Для решения задач многокритериальной оптимизации применимы методы GA, динамических игр Гамильтона-Якоби-Айзекса (НJI). Эффективность методов показана на примере систем управления.
4. ПРИМЕР ИНТЕЛЛЕКТУАЛЬНОЙ СИСТЕМЫ ПОДДЕРЖКИ ПРИНЯТИЯ РЕШЕНИЙ «АРМИД-ЭКСПЕРТ»
4.1. Общая структура программного обеспечения
Автоматизированное рабочее место инженера-диагноста АРМИД предназначено для хранения, анализа и обмена информацией. Представляет собой многоуровневую иерархическую базу разнородных данных о состоянии оборудования: вибрационных, параметрических, прочностных, технических, описательных.
Иерархия базы (предприятие, объект, агрегат, узел и т.д.) формируется пользователем.
183
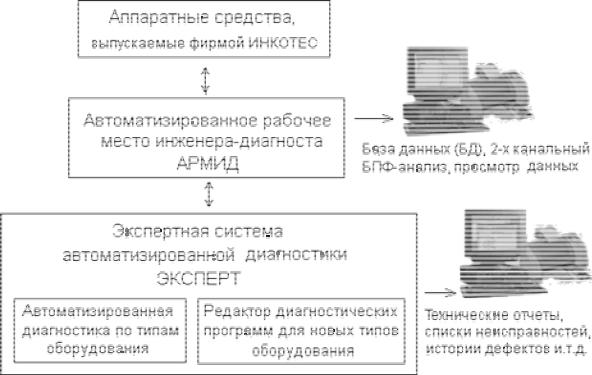
Экспертная система ЭКСПЕРТ предназначена для автоматизированной диагностики неисправностей конкретных типов оборудования по заложенным в ней методикам и для создания новых в редакторе методик. Автоматизированная диагностика проводится по результатам измерений, хранящихся в БД АРМИД, и в этой части экспертная система взаимосвязана с базой данных. Редактор методик является самостоятельной программой и дает возможность пользователю создавать методики поиска неисправностей, сохранять их в БД АРМИД и проводить по ним диагностику своего оборудования.
Операционная среда: DOS, Windows 95/98/NT/Me/2000/XP. Об-
щая структура программного обеспечения приведена на рис. 27.
Рис. 27. Общая структура программного обеспечения
4.2.Автоматизированное рабочее место инженера-диагноста «АРМИД»
Идея создания АРМИД преследовала цель получить удобный и многофункциональный инструмент для управления данными в системах технического обслуживания оборудования и трубопроводов,
184
имеющий открытый протокол обмена и способный поддерживать работу с аппаратурой разных фирм-производителей.
С учетом этих задач инженеры-диагносты фирмы ИНКОТЕС испытывали и дорабатывали первые версии программы на объектах газовой и нефтяной промышленности.
В процессе совершенствования ПО АРМИД приобрело новые функции, отвечающие современным требованиям технической диагностики, поддерживает работу со всеми вибродиагностическими и ультразвуковыми приборами неразрушающего контроля, выпускаемыми фирмой ИНКОТЕС, имеет открытый формат хранения данных, что позволяет легко адаптировать ПО в контрольно-измерительные и информационные системы разнообразных технических объектов (рис. 28).
Новая версия АРМИД, сохраняя все функции предыдущей, имеет ряд преимуществ:
неограниченный уровень вложенности баз;
неограниченное количество инспекций для каждого агрегата (хранение неограниченного количества данных по каждому объекту благодаря специальной оптимизированной структуре файлов);
возможность хранения данных с использованием SQL-серверов, что обеспечивает централизованное хранение данных и работу большого числа пользователей;
возможность копирования не только объектов, но и объектов с содержимым (измерениями);
возможность конвертации старых баз данных в новую версию;
возможность визуальной оценки состояния агрегата по проведенным измерениям непосредственно в главном окне БД;
к паспорту инспекции добавился паспорт агрегата;
возможность работы СМ-3001 под Windows 2000, Windows XP;
полностью модифицирован модуль статистического анализа, что позволяет поводить расширенный анализ данных для определения пороговых и нормировочных значений контролирующих параметров
взадачах технического обслуживания оборудования по состоянию;
возможность работы в сети: сетевая версия пакета АРМИД - Web-АРМИД предназначена для работы в глобальных компьютерных сетях предприятий, имеющих большое количество объектов контроля.
185