Материал: 2323
СТРОИТЕЛЬНАЯ ТЕХНИКА
получить основные аналитические зависимости, устанавливающие связь между неровностями микрорельефа и основными геометрическими параметрами кранатрубоукладчика.
Ключевые слова: кран-трубоукладчик, микрорельеф, колебания, тангаж, крен.
|
Введение |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Для анализа работы крана-трубоукладчика (КТ) необходима оценка влияния рельефа, по |
|
|||||||||||||||||||||||
которому передвигается кран, на колебания груза на стреле. |
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
Неровности поверхности условно можно разделить на 3 основные составляющие: |
|
|||||||||||||||||||||||
макропрофиль, микропрофиль и шероховатость. Макропрофиль состоит из длинных плавных |
|
||||||||||||||||||||||||
неровностей (длина волны от 100 м и более) и фактически не вызывает колебаний машины. |
|
||||||||||||||||||||||||
Микропрофиль состоит из неровностей длиной от 0,1 до 100 м и вызывает существенные |
|
||||||||||||||||||||||||
колебания машины. Шероховатости (длина волны менее 0,1 м) сглаживаются гусеницами и не |
|
||||||||||||||||||||||||
вызывают ощутимых колебаний машины [1, 2, 3, 4]. |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
Движение по неровностям микропрофеля приводят изменению положения машины в |
|
|||||||||||||||||||||||
пространстве, что регистрируется датчиками продольного (тангажа) и поперечного крена. |
|
||||||||||||||||||||||||
Важно проследить зависимость изменения высоты подвеса груза от угла тангажа и крена КТ. |
|
||||||||||||||||||||||||
Учитывая жесткую подвеску базового трактора и отсутствие деформации со стороны грунта, |
|
||||||||||||||||||||||||
рассмотрим процесс преодоления препятствия как три возможных этапа. |
|
|
|
|
|
||||||||||||||||||||
|
Определение вертикального смещения оголовка стрелы |
|
|
|
2 |
|
|
||||||||||||||||||
стрелы, |
|
т |
– |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Первый этап это тангаж машины в отсутствии крена. На рисунке 1 схематично показан |
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
– высота препятствия, |
|
|
– длина |
|
|||
первый этап, где |
– угол тангажа, – угол наклона стрелы, |
|
п |
|
|
|
|||||||||||||||||||
|
|
|
|
|
вертикальное смещение точки , стрелкой задано направление движения КТ. Этап |
|
|||||||||||||||||||
заключается |
|
в повороте |
точек |
|
базовой машины |
вокруг |
оси |
|
на угол , |
|
что дает |
|
|||||||||||||
вертикальное смещение конца |
стрелы на расстояние . |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
55 |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Расчетная схема будет иметь вид рисунок 2, где: – межосевое расстояние натяжных колес КТ, |
|
|||||||||||||||||||||||
|
– гипотенуза, |
п – |
т |
|
– |
радиус |
поворота точки , |
|
|
– |
|
|
|
|
|
|
|
||||||||
3 |
– высота подвеса груза, |
|
|
|
горизонтальная составляющая |
|
|||||||||||||||||||
|
|
|
|
|
|
|
, |
|
– |
искомая |
вертикальная |
составляющая перемещения |
точки , |
|
|||||||||||
перемещения |
точки |
|
|
||||||||||||||||||||||
высота препятствия.
Рис 1. Схематичное изображение тангажа КТ на угол β
|
|
Техника и технологии строительства, № 4 (8), 2016 |
http://ttc.sibadi.org/ |
СТРОИТЕЛЬНАЯ ТЕХНИКА
|
|
Рис. 2. Расчетная схема вертикального перемещения стрелы при тангаже |
|
|
|
|
|
|
||||||||||||||||||||||||
Допустим, что мы уже знаем значение угла тангажа |
, получив его с датчика |
крена, |
|
|||||||||||||||||||||||||||||
установленного в кабине КТ и значение угланаклонна стрелы |
рис. 1, получив его с маятникового |
|
||||||||||||||||||||||||||||||
датчика угла, установленного на основании стрелы. Искомую составляющую |
|
найдем как разность |
|
|||||||||||||||||||||||||||||
вертикальных проекций |
и |
1 |
, до и после наезда на препятствие, формула (1).т |
1 |
|
|
|
(1) |
|
|
||||||||||||||||||||||
где |
|
|
|
|
|
|
|
|
|
= 2 ∙ sin( ) ; |
|
|
|
|
на препятствие, |
|
|
|
|
(2) |
|
56 |
||||||||||
|
– вертикальная проекция стрелыт = до1 |
−наезда. |
|
|
|
– вертикальная |
|
|||||||||||||||||||||||||
проекция радиуса поворота |
|
|
после наезда на препятствие, формулы (2) и (3) соответственно: |
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
) |
. |
|
|
|
|
|
|
|
|
|
|
(3) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Для нахождения высоты |
|
|
|
потребуется= определить∙ sin( + |
|
|
радиус поворота точки , и угол . |
|
|
|
||||||||||||||||||||||
найдем как гипотенузу |
прямоугольного треугольника |
|
|
|
|
|
. Примем сторону |
|
|
|
равной половине |
|
||||||||||||||||||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
длины , заданной в начале алгоритма. В ином |
случаи её можно принять как отдельную, |
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
заранее известную, переменную. |
|
= 2 |
+ |
2 ; |
|
|
|
|
|
|
|
|
|
|
|
(4) |
|
|
||||||||||||||
Угол найдем из того же треугольника . |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
(5) |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
= |
/2. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Подставив уравнения (2,3,4,5) в формулу (1) получим: |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
( |
|
∙ sin( )) |
2 |
2 |
|
|
|
|
|
|
+ − ∙ sin( ). |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
= |
|
|
+ 2 |
∙ sin |
|
|
|
|
|
|
|
(6) |
|
|
|||||||||||||||
|
|
т |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
||
Формула определения вертикального |
перемещения в случае, когда машина съезжает в |
|
||||||||||||||||||||||||||||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
углубление или же наезжает на препятствие, двигаясь назад, аналогично, за исключением того, |
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
Техника и технологии строительства, № 4 (8), 2016 |
|
|
http://ttc.sibadi.org/ |
|
|
|||||||||||||||||||||||||||
СТРОИТЕЛЬНАЯ ТЕХНИКА
что угол проекции |
|
будет находиться не из суммы, а из разности углов |
|
и |
|
. Формула |
||||||||||
нахождения т будет 1иметь вид: |
|
|
2 |
|
|
|
|
|
|
|
||||||
|
|
= |
|
( ∙ sin( )) |
2 |
|
|
− − |
∙ sin( ). |
|
|
|
|
(7) |
||
т |
|
+ 2 |
∙ sin /2 |
|
|
|
|
|||||||||
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|
|
||
|
|
|
|
|
На |
рисунке |
3 показан крен |
на угол |
при |
|
наезде на |
|||||
Рассмотрим вариант крена КТ. |
|
|||||||||||||||
препятствие высотой |
|
п. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
что приводит к |
|
Рис 3. Схематичное изображение крена КТ на угол |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
57 |
|||
В случаи крена точки |
|
базовой машины совершают поворот относительно оси |
|
на угол , |
|
||||||||||||||
|
вертикальному |
смещению |
кр |
точки |
|
|
|
|
|
|
– длина |
стрелы, |
кр |
|
|||||
|
|
|
. Что бы определить смещение |
|
|
|
|||||||||||||
воспользуемся расчетной схемой |
представленной на рисунке 4, где |
|
|
|
|
|
|
– |
|
||||||||||
вертикальная проекция стрелы до наезда на препятствие, |
|
|
– |
вертикальная проекция стрелы после |
|
||||||||||||||
|
|
|
2 |
|
|
|
|
|
|
||||||||||
наезда на препятствие, п – высота препятствия, |
– угол |
наклонастрелы, |
|
– угол крена. |
|
|
|
|
|||||||||||
|
1 |
|
|
|
|
|
|
|
|
|
|||||||||
Рис. 4 Расчетная схема вертикального перемещения стрелы при крене
Вертикальную составляющую |
|
найдем как разность вертикальных проекций стрелы до и |
||
после наезда на препятствие, |
формула (8): |
|
||
|
кр |
кр = 1 − . |
|
|
|
|
|
(8) |
|
Зная длину стрелы 2, угол наклона стрелы и угол крена КТ , найдем и 1. |
||||
Техника и технологии строительства, № 4 (8), 2016 |
http://ttc.sibadi.org/ |
|||
СТРОИТЕЛЬНАЯ ТЕХНИКА
|
= 2 ∙ sin( ) ; |
) |
|
(9) |
|
1 |
2 |
|
(10) |
||
Подставив данные формул (10) и (9) |
в=формулу∙ sin( (8)+ получим. |
: |
|
||
кр = 2 |
|
∙ sin( + ) − 2 |
∙ sin( ). |
(11) |
|
Формула (11) справедлива при условии наезда правой гусеницей, если же КТ совершает наезд левой гусеницей, то расчетная схема имеет вид:
|
|
|
Рис. 5. Расчетная схема вертикального перемещения конца стрелы |
|
|
|
|
|
|
58 |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
при наезде на препятствие левой гусеницей |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Как и в предыдущем случае, вертикальная смещение ровно разности |
и |
|
|
, формула (8). |
||||||||||||||||||||||||||
Разница заключается в радиусе поворота. Из рисунка 5 видно, что точка |
совершает поворот |
|||||||||||||||||||||||||||||
|
1 |
|
|
|
|
|
|
|||||||||||||||||||||||
на угол |
относительно точки |
|
, следовательно и радиус поворота точки будет отличаться от |
|||||||||||||||||||||||||||
предыдущей |
расчетной |
схемы. Следовательно, и |
|
|
будет |
находиться |
как |
|
проекция , |
|||||||||||||||||||||
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, введем |
|||||||
формула (12). В целях упрощения расчета и |
нахождения радиуса поворота точки , |
|
||||||||||||||||||||||||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
||||||||||||
точку . |
Таким |
образом, |
|
найдем |
из |
прямоугольного |
треугольника |
|
|
|
, |
формула (13), |
||||||||||||||||||
|
|
|
|
|
|
3 |
|
|
|
|
||||||||||||||||||||
предварительно |
посчитав расстояние |
|
, формула |
|
(14), |
как |
горизонтальную |
|
проекцию . |
|||||||||||||||||||||
Расстояние |
найдем как сумму длин 1 |
ширина колеи, известная нам) и |
|
, формула (15). |
2 |
|
|
|||||||||||||||||||||||
( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
1 = 3 ∙ sin( + ) ; |
|
|
|
|
|
|
|
|
|
|
|
|
(12) |
|
|||||||||
|
|
|
|
|
|
|
|
3 |
= √ 2 + 2 |
; |
|
|
|
|
|
|
|
|
|
|
|
|
(13) |
|
||||||
|
|
|
|
|
|
|
|
|
= 2 |
∙ cos( ); |
|
|
|
|
|
|
|
|
|
|
|
|
(14) |
|
||||||
|
|
|
|
|
|
|
= 1 |
+ 2 ∙ cos( ). |
|
|
|
|
|
|
|
|
|
|
|
|
(15) |
|
||||||||
где угол найдем из прямоугольного треугольника : |
|
|
|
|
|
|
|
|
|
|
|
|
(16) |
|
||||||||||||||||
|
|
|
|
|
2 |
|
|
= . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Подставив формулы (9,12,13,14,15,16) в |
формулу 8 получим: |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(17) |
|
|||||||||||
|
кр |
= ( 2 ∙ cos( )) |
+ ( 1 + 2 ∙ cos( )) |
|
∙ sin + − 2 ∙ sin( ). |
|
|
|
|
|
|
|||||||||||||||||||
Техника и технологии строительства, № 4 (8), 2016 |
|
|
|
|
http://ttc.sibadi.org/ |
|
|
|||||||||||||||||||||||
СТРОИТЕЛЬНАЯ ТЕХНИКА
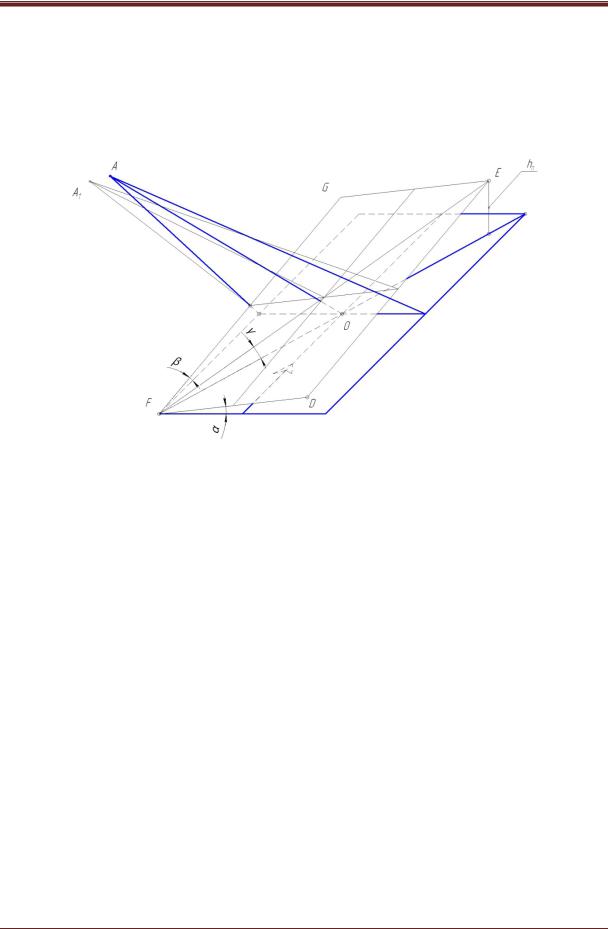
Рассмотрим случай определения вертикальной составляющей при одновременном крене и
тангаже машины (рисунок 6). В таком случаи КТ совершает вращение с радиусом |
|
на угол γ. |
|||||||
Поиск угла γ и радиуса поворота |
|
затруднителен. Целесообразно |
представить данное |
||||||
|
|
|
|
|
|
||||
вращение, как последовательность |
вращений, крена на угол и тангажа на угол |
|
[1], которые, |
||||||
|
|
|
|
сложением или же |
|||||
в свою очередь, считаются по выше указанной методике. С последующим |
|||||||||
|
|
|
|
||||||
вычитанием вертикальных составляющих от крена и тангажа, в зависимости от схемы наезда на препятствие.
Рис 6. Схематичное изображение сложного вращения КТ
В |
итоге получим, что суммарная |
вертикальная составляющая |
|
в случаи наезда на |
59 |
|||
|
|
|||||||
|
|
|||||||
препятствие правой гусеницей определяется как сумма вертикальных |
составляющих от крена и |
|
||||||
|
|
|
||||||
тангажа соответственно, формула (18): |
= кр + т. |
|
(18) |
|
||||
где |
находится по формуле (11), hт формула (6). |
|
|
|
||||
При наезде на препятствие левой гусеницей формула определения h имеет вид: |
|
|||||||
кр |
|
|
|
= кр − т. |
|
|
|
|
|
|
|
|
|
(19) |
|
||
В данном случае |
|
считается по формулам (17). |
|
|
|
|||
В обратном случае, съезд КТ в углубление, |
т будет определяться по формуле (7). |
|
||||||
Вывод |
кр |
|
|
|
||||
С помощью полученных уравнений, мы можем проследить зависимость изменения высоты подвеса груза от угла тангажа и крена. Таким образом, полученные зависимости и схемы могут быть использованы для решения задач компьютерного моделирования КТ и систем его управления.
Библиографический список
1.Щербаков, В.С. Методы управления комплектом машин трубоукладочной колонны: монография / В.С. Щербаков, А. Н. Шабалин, М.С. Корытов – Омск: СибАДИ, 2014. – 151 с.
2.Тихонов, Ю.Б. Повышение устойчивости изоляционно-укладочной колонны путем совершенствования систем управления кранами-трубоукладчиками: дис. …канд. тех. наук: 05.05.04 / Ю.Б. Тихонов. – Омск:
СибАДИ, 1989. – 231 с.
3.Сухарев, Р.Ю. Совершенствование системы управления рабочим органом цепного траншейного экскаватора: дис. … канд. техн. наук: 05.05.04 / Р.Ю. Сухарев. – Омск, 2008. – 170 с.
|
|
Техника и технологии строительства, № 4 (8), 2016 |
http://ttc.sibadi.org/ |