|
|
|
|
|
|
2Vx |
dVx |
|
|
dVy |
dVz |
|
|
|
|
dV |
|
dt |
2Vy |
|
2Vz dt |
|
Согласно формуле (4.26), |
a |
|
dt |
dt |
|
2 |
Vx2 Vy2 Vz2 |
или |
a |
Vxax |
Vy ay Vz az |
. |
|
(4.28) |
|
|
|
|
|
|
|
С |
|
|
|
|
|
V |
|
|
|
|
V 2 |
|
|
|
|
|
|
|
|
|
|
|
|
Знак плюс, полученный в ответе после вычисления дроби, соответствует ускоренному движению точки, а знак минус – замедленному. Нормальное ускорение точки определяют из формулы
(4.25): an a2 |
a2 . |
|
|
|
|
траектории |
|
an . |
Рад ус кр в зны |
|
|
находим из формулы (4.26) |
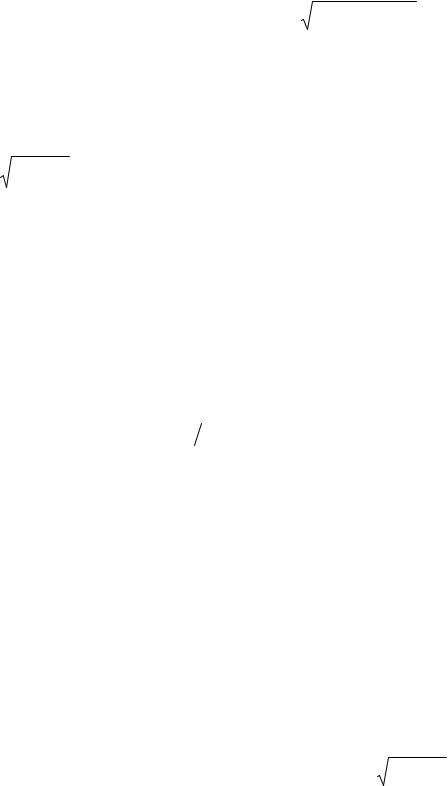
4.7. Класс ф кац я движений точки по ускорениям её движения |
Выясн м |
зав с мость |
характера движения от значений её |
нормального |
касательного ускорений в течение некоторого промежутка |
времени. |
|
|
|
|
|
|
Случай 1. an 0 ; a 0 . Точка движется прямолинейно и равномерно. |
|
|
|
|
|
|
|
|
б |
|
Случай 2. |
an 0 ; |
a 0 . |
Точка движется криволинейно и равномерно. |
Модуль её ускорения |
a an V 2 . Если a 0 в отдельный момент |
модуль её скорости Аимеет экстремальное значение. Например, при колебаниях маятника его скорость максимальна в вертикальном
времени, то точка не движется равномерно, а в этот момент времени
положении маятника. При экстремуме скорости ускорение в этом положении маятника a 0 .
Случай 3. an 0 ; a 0 . Точка движется прямолинейно и неравномерно.
|
|
2 |
|
2 |
|
|
|
Дd s V |
Модуль её ускорения |
a a |
dt2 |
. Если an |
|
0 |
в некоторый |
|
|
|
|
|
момент времени, то точка не движется прямолинейно, а проходит точку перегиба траектории или модуль её скорости обращается в нуль
(например, при изменении направления движения точки |
V 0 ), |
в этой |
точке скорость меняет знак. |
|
|
И |
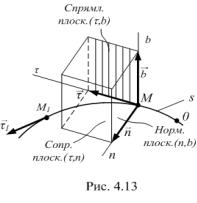
Случай |
4. |
an 0 ; |
a 0 . |
Точка |
совершает |
криволинейное |
неравномерное |
движение. |
Модуль |
её ускорения a |
a2 an2 . |
Если |
направления |
векторов V и |
a совпадают, |
то движение |
ускоренное, в |
противном случае – замедленное.
 V
V a
a