по формуле
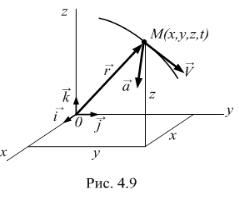
Проекция вектора скорости на какую-либо координатную ось равна первой производной по времени от соответствующей координаты движущейся точки.
По проекциям определяют модуль скорости и направляющие
косинусы углов вектора скорости с осями координат: |
|
|
|
|
|
|
|
|
|
|
|
С |
|
|
|
|
|
|
|
|
|
|
V |
x |
|
|
|
|
|
|
Vy |
|
|
V |
Vx2 |
Vy2 |
Vz2 |
x2 y2 z2 |
; |
cos(V,i ) |
|
; |
|
|
cos(V, |
j) |
|
; |
|
|
|
|
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos(V,k ) |
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
оси |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
то, |
выбрав |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если точка дв жется в плоскости, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
коорд нат Оx |
|
Оy в этой плоскости, получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z const 0; |
|
Vz z |
0; |
Vy |
y |
; Vx x . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
Соответственно |
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
x |
|
y |
|
; cos(V |
,i ) V |
; |
cos(V |
, j) V . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А |
|
|
|
|
|
|
|
|
Для прямолинейного движения точки координатную ось, например |
Оx, направляют по траектории (рис. 4.10). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тогда |
y const 0 |
и |
z const 0 , |
следовательно, |
y 0; |
z 0 . |
Координату точки, проекцию скорости и ее модуль определяют по |
формулам x f (t); |
|
Vx |
x ; |
V Vx . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4.3.2. Уравнение годографа вектора скорости |
|
|
|
|
|
|
|
|
Пусть известны уравнения движения точки в декартовых |
координатах. |
На |
рис. |
4.7,а |
показаны траектория |
точки |
и |
несколько |
векторов скорости для |
|
|
|
|
|
|
|
|
|
|
И |
разных моментов времени, а на рис. 4.7,б показан |
годограф вектора скорости движения точки.
Точке М (x, y, z) на траектории соответствует точка АM (Vx ,Vy ,Vz ) на
годографе вектора скорости.
Координаты точки АM , согласно определению годографа, выражают через проекции скорости на ортогональные оси координат О Vx , Vy , Vz
V Vxi Vy j Vz k , где Vx (t) x ; Vy (t) y ; Vz (t) z .
Представленные выражения проекций вектора скорости являются параметрическими уравнениями годографа вектора скорости.