Материал: 2015 [Тынчеров] Основы автоматизации ТПНП
гия вибраций машины распределяется между этими степенями свободы в зависимости от их собственных частот и демпфирования, а также в зависимости от частоты источника энергии. Поэтому вибрационная энергия никогда не распределена равномерно по всей машине. Например, в машине с электродвигателем главным источником вибраций является остаточный дисбаланс ротора двигателя. Это приводит к заметным уровням вибрации на подшипниках двигателя. Однако если одна из собственных частот машины близка к оборотной частоте ротора, то ее вибрации могут быть велики и на довольно большом удалении от двигателя. Этот факт необходимо учитывать при оценке вибрации машины: точка с максимальным уровнем вибрации не обязательно располагается рядом с источником возбуждения. Вибрационная энергия часто перемещается на большие расстояния, например, по трубам, и может вызвать настоящее опустошение при встрече с удаленной конструкцией, чья собственная частота близка к частоте источника.
Линейные и нелинейные системы. Для понимания механизма передачи вибраций внутри машины важно усвоить понятие линейности и то, что понимают под линейной или нелинейной системами. До сих пор мы пользовались термином «линейный» лишь применительно к шкалам амплитуды и частоты. Однако этот термин применяют также для описания поведения любых систем, имеющих вход и выход. Системой мы называем здесь любое устройство или конструкцию, которые могут воспринимать возбуждение в какой-либо форме (вход) и давать на него соответствующий отклик (выход). В качестве примера можно привести магнитофоны и усилители, преобразующие электрические сигналы, или механические конструкции, где на входе мы имеем возбуждающую силу, а на выходе — вибросмещение, скорость и ускорение.
Определение линейности. Систему называют линейной, если она удовлетворяет двум следующим критериям:
Если вход х вызывает в системе выход X, то вход 2х даст выход 2Х. Иными словами, выход линейной системы пропорционален ее входу. Это проиллюстрировано на рисунке 5.10.
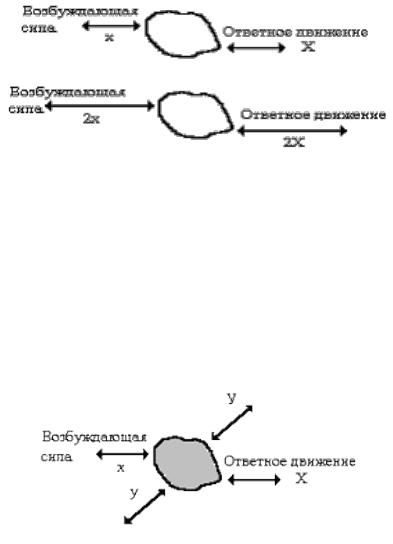
Рис. 5.10 — Иллюстрация понятия «линейная система»
Если вход х дает выход X, а вход у — выход Y, то вход х + у даст выход X + Y. Иными словами, линейная система обрабатывает два одновременных входных сигнала независимо друг от друга, причем они не взаимодействуют между собой внутри нее. Отсюда следует, в частности, что линейная система не дает на выходе сигнал с частотами, отсутствовавшими во входных сигналах. Это проиллюстрировано на рисунке 5.11.
Рис. 5.11 — Линейная система не дает на выходе сигнал с частотами, отсутствовавшими во входных сигналах
Обратите внимание, что эти критерии отнюдь не требуют, чтобы выход был аналоговым или сходным по своей природе со входом. Например, на входе может быть электрический ток, а на выходе — температура. В случае механических конструкций, в частности машин, мы будем рассматривать в качестве входа вибрационную силу, а в качестве выхода — саму измеряемую вибрацию.
Нелинейные системы. Ни одна реальная система не является абсолютно линейной. Существует большое разнообразие нелинейностей, которые в той или иной степени присутствуют в любой механической системе, хотя многие из них ведут себя почти линейно, особенно при слабом входе. Не полностью линейная система имеет на выходе частоты, которых не было на входе. Примером этого являются стереоусилители или магнитофоны, которые генерируют гармоники входного сигнала вследствие так называемого нелинейного (гар-
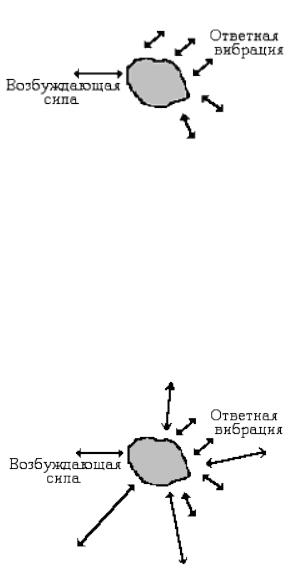
монического) искажения, ухудшающего качества воспроизведения. Гармоническое искажение почти всегда сильнее при высоких уровнях сигнала. Например, маленький радиоприемник звучит довольно чисто при тихом уровне громкости и начинает трещать при усилении звука. Это явление проиллюстрировано ниже:
Рис. 5.12 — Иллюстрация нелинейной системы
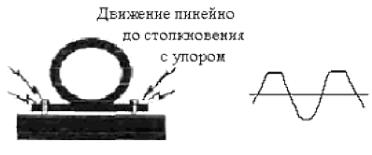
Многие системы имеют почти линейный отклик на слабый входной сигнал, но становятся нелинейными при более высоких уровнях возбуждения. Иногда существует определенный порог входного сигнала, незначительное превышение которого ведет к сильной нелинейности. Примером может служить отсечение сигнала в усилителе, когда входной уровень превышает допустимый размах напряжения или тока блока питания усилителя.
Рис. 5.13 — Пример отсечения сигнала в усилителе, когда входной уровень превышает допустимый размах напряжения или тока блока питания усилителя
Еще одним типом нелинейности является взаимная модуляция, когда два или более входных сигнала взаимодействуют друг с другом и производят новые частотные компоненты, или модуляционные боковые полосы, отсутствовавшие в любом из них. Именно с модуляцией связаны боковые полосы в спектрах вибрации.
Нелинейности роторных машин. Как мы уже упоминали, виб-
рация машины — это фактически отклик на силы, вызванные ее движущимися частями. Мы измеряем вибрацию в разных точках машины и находим значения сил. Измеряя частоту вибрации, мы предполагаем, что и вызывающие ее силы имеют те же частоты, а ее амплитуда пропорциональна величине этих сил. То есть мы предполагаем, что машина является линейной системой. В большинстве случаев такое предположение разумно.
Рис. 5.14 — Иллюстрация нелинейности роторных машин
Однако по мере того, как машина изнашивается, увеличиваются ее зазоры, появляются трещины, разболтанность и т. д., ее отклик будет все больше отклоняться от линейного закона, и в результате характер измеряемой вибрации может стать отличным от характера возбуждающих сил.
Например, несбалансированный ротор воздействует на подшипник с синусоидальной силой на частоте 1Х, и других частот в этом возбуждении нет. Если механическая структура машины нелинейная, то возбуждающая синусоидальная сила будет искажена, и в результирующем спектре вибрации помимо частоты 1Х появятся ее гармоники. Количество гармоник в спектре и их амплитуда являются мерой нелинейности машины. Например, по мере износа подшипника скольжения в спектре его вибрации возрастает количество гармоник и увеличивается их амплитуда.
Гибкие соединения с несоосностью являются нелинейными. Именно поэтому их вибрационные характеристики содержат сильную вторую гармонику оборотной частоты (то есть 2Х). Износ муфты с несоосностью часто сопровождается сильной третьей гармоникой оборотной частоты (3Х). Когда силы с разными частотами взаимодействуют внутри машины нелинейным образом, возникает модуляция, и в спектре вибрации появятся новые частоты. Эти новые частоты, или
боковые полосы, присутствуют в спектрах дефектных зубчатых передач, подшипников качения и т. д. Если зубчатое колесо имеет эксцентриситет или какую-то неправильную форму, то оборотная частота будет модулировать частоту зацепления зубьев, приводя к боковым полосам в спектре вибрации. Модуляция — это всегда нелинейный процесс, при котором появляются новые частоты, отсутствовавшие в возбуждающей силе.
Резонанс. Резонансом называют такое состояние системы, при котором частота возбуждения близка к собственной частоте конструкции, то есть частоте колебаний, которые будет совершать эта система, будучи предоставлена самой себе после выведения из состояния равновесия. Обычно механические конструкции имеют множество собственных частот. В случае резонанса уровень вибрации может стать очень высоким и привести к быстрому разрушению конструкции.
Резонанс проявляется в спектре в виде пика, положение которого остается постоянным при изменении скорости машины. Этот пик может быть очень узким или, наоборот, широким, в зависимости от эффективного демпфирования конструкции на данной частоте.
Для того чтобы определить, имеет ли машина резонансы, можно выполнить один из следующих тестов:
Тест-удар (bump test) — по машине ударяют чем-нибудь тяжелым, например киянкой, записывая при этом вибрационные данные. Если машина имеет резонансы, то в ее затухающей вибрации выделятся собственные частоты.
Разгон или выбег — машину включают (или отключают) и одновременно снимают вибрационные данные и показания тахометра. Когда обороты машины приблизятся к собственной частоте конструкции, на временной реализации вибрации появятся сильные максимумы.
Тест с вариацией скорости — скорость машины меняют в широком диапазоне (если это возможно), снимая данные вибрации и показания тахометра. Полученные данные затем интерпретируют так же, как в предыдущем тесте. На рисунке приведена идеализированная кривая механического резонансного отклика. Поведение резонирующей системы под воздействием внешней силы, очень интересно и немного противоречит бытовой интуиции. Оно строго зависит от частоты возбуждения.