Материал: 1778
пути передачи воздействий между ними. Графическое изображение структуры управления называется структурной схемой. Хотя исходные данные для выбора структуры управления и ее иерархии с той или иной степенью детализации оговариваются заказчиком при выдаче задания на проектирование, полная структура управления должна разрабатываться проектной организацией.
Выбор структуры управления объектом автоматизации оказывает существенное влияние на эффективность её работы, снижение относительной стоимости системы управления, ее надежности, ремонтоспособности и т.д. В самом общем виде структурная схема системы автоматизации представлена на рис. 6. Система автоматизации состоит из объекта автоматизации и системы управления этим объектом. Благодаря определенному взаимодействию между объектом автоматизации и системой управления, система автоматизации в целом обеспечивает требуемый результат функционирования объекта, характеризующийся параметрами x1, х2, … , xn.
К этим параметрам можно отнести, например, величины, характеризующие конечный продукт технологического процесса, отдельные параметры, определяющие ход технологического процесса, его экономичность, обеспечение безаварийного режима и т.д. Кроме этих основных параметров, работа комплексного объекта автоматизации характеризуется рядом вспомогательных параметров y1, y2, ... , yj, которые также должны контролироваться и регулироваться (например, поддерживаться постоянными). К такого рода параметрам можно отнести, например, величины, характеризующие работу установок подготовки технологического пара, насосных станций оборотного водоснабжения и т.д. От этих установок требуется только подача на вход технологической установки сырья и энергоносителей с заданными параметрами. При этом необходимая дозировка подачи сырья и энергоносителей осуществляется средствами управления, относящимися к технологической установке.
В процессе работы на объект поступают возмущающие воздействия f1, f2, ... , fi, вызывающие отклонения параметров x1, х2, ... , хn от их требуемых значений. Информация о текущих значениях x1, х2, ..., хn; y1, y2, ... , yj поступает в систему управления и сравнивается с предписанными им значениями g1, g2, … , gk, в результате чего система управления вырабатывает управляющие воздействия 1, 2, ... , m для компенсации отклонений выходных параметров от их заданных значений. Таким образом, объект автоматизации в общем случае состоит
31
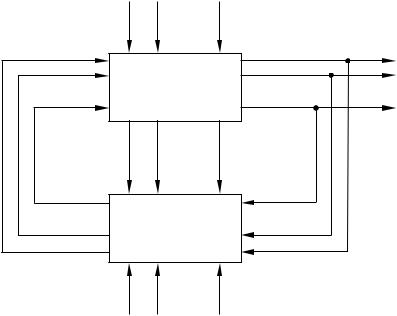
из нескольких в большей или меньшей степени связанных друг с другом участков управления. Участки управления физически могут представляться в виде отдельных установок, агрегатов и т.д. или в виде локальных каналов управления отдельными параметрами одних и тех же установок, агрегатов и т.д.
В свою очередь, система управления в зависимости от важности регулируемых параметров, квалификации эксплуатационного персонала, которым необходимо знать их значения для осуществления оптимального управления объектом, в общем случае должна обеспечивать разные уровни управления объектом автоматизации, т.е. должна состоять из нескольких пунктов управления, в той или иной степени взаимосвязанных друг с другом.
f1 |
f2 |
· · · |
fi |
|
1 |
|
|
|
x1 |
2 |
|
|
|
|
|
|
· |
x2 |
|
· |
Объект |
|||
· |
· |
|
||
· |
|
|
· |
xn |
m |
|
|
|
|
y1 |
y2 |
· · · |
yj |
|
· |
Система |
· |
|
|
· |
управления |
· |
|
|
· |
· |
|
||
g1 |
g2 |
· · · |
gk |
|
Рис. 6. Структурная схема системы автоматизации
С учетом изложенного структуры управления объектом автоматизации могут быть в частных случаях одноуровневыми централи-
зованными, одноуровневыми децентрализованными и многоуровне-
выми. Одноуровневые системы управления, в которых управление объектом осуществляется с одного пункта управления, называются централизованными. Одноуровневые системы, в которых отдельные части сложного объекта управляются из самостоятельных пунктов управления, называются децентрализованными.
Структурные схемы одноуровневых централизованных и децентрализованных систем приведены на рис. 6, где стрелками показаны
32
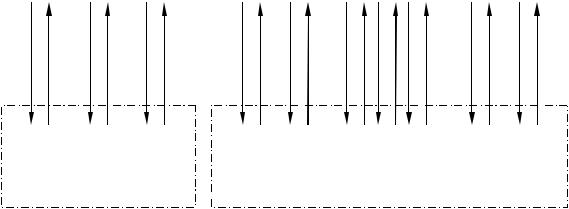
только основные потоки передачи информации от объекта управления к системе управления и управляющие воздействия системы на объект управления. На рис. 7 отдельные части сложного объекта управления, управляемые соответственно с пунктов управления ПУ1 … ПУ3, разделены штрихпунктирными линиями.
До разработки концепции интеграции систем управления предприятия и основ CALS-технологий одноуровневые централизованные системы применялись в основном для управления относительно несложными объектами или объектами, расположенными на небольшой территории. Это было обусловлено тем, что большинство промышленных объектов в прошлом и настоящем времени представляют собой сложные комплексы, отдельные части которых расположены на значительном расстоянии друг от друга.
Объект |
|
Объект |
управления |
|
управления |
|
|
|
ЦПУ |
|
ПУ 1 |
|
|
ПУ 2 |
|
|
ПУ 3 |
|
|
|
|
|
|
|
|
|
Уровень управления |
|
|
Уровень управления |
|
||||
а) |
|
|
|
|
б) |
|
||
Рис. 7. Примеры одноуровневых систем управления:
а – централизованная система; б – децентрализованная система; ЦПУ – центральный пост управления; ПУ1… ПУ 3 – местные посты управления данного уровня
Более того, кроме основных технологических установок, объекты промышленности, в том числе и строительной, имеют большое число вспомогательных установок-подобъектов (промышленные котельные установки, компрессорные станции, насосные отделения оборотного водоснабжения, котлы-утилизаторы, очистные сооружения и т.п.), которые необходимы для обеспечения технологических
33
установок всеми видами энергии, а также для утилизации и нейтрализации остаточных продуктов технологического процесса.
При использовании проводных связей система управления такого комплексного объекта, построенная по одноуровневой централизованной системе, получается достаточно сложной ввиду усложнения коммуникаций; кроме того, резко возрастают затраты на изготовление такой системы управления и ее эксплуатации. Центральный пульт управления без применения SCADA-систем (построения мнемосхем на панелях щитов и пультов, с помощью цветной проволоки или краски и стрелочных или самопишущих приборов) получается очень громоздким. Переработка информации, большая часть которой является ненужной для непосредственного ведения технологического процесса, представляла ранее достаточно большие затруднения. Удаленность пункта управления от того или иного вспомогательного подобъекта затрудняла принятие оперативных мер по устранению тех или иных неполадок. Поэтому ранее, в основном на сложных комплексных объектах управления, применялась одноуровневая децентрализованная система управления.
С появлением SCADA-систем, CALS-технологий, развитием аппаратной части электронно-вычислительных машин и появлением достаточно надежных беспроводных систем передачи информации, при автоматизации сложных комплексных объектов управления вновь стали применяться централизованные системы управления. Основная концепция систем управления, построенных по принципам CALSтехнологий, и факт использования возможностей SCADA-систем диктуют необходимость централизации систем управления (за счет применения единой базы данных, куда стекается вся информация об объекте управления, управляющих и измеряемых возмущающих воздействиях).
Разработанные в последнее десятилетие линейные и нелинейные устройства управления позволяют успешно управлять локальными низкоуровневыми объектами сложного производственного процесса и, кроме того, приспособлены к передаче информации об объекте управления, управляющих и измеряемых возмущающих воздействий в единую базу данных предприятия с использованием стандартных сетевых протоколов. Этот факт диктует необходимость создания многоуровневых (минимально – двухуровневых) систем управления. Нижним уровнем в таких системах являются локальные регуляторы, а верхним – SCADA-система, с помощью которых диспетчеры контро-
34
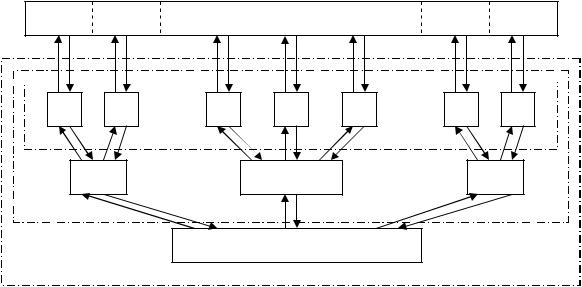
лируют работу систем нижнего уровня и задают управляющие воздействия на локальные регуляторы, а также различные системы, осуществляющие анализ производственного процесса и позволяющие определять оптимальные или рациональные режимы работы оборудования. В идеале в будущем должны быть созданы автоматические адаптирующиеся (саморегулирующиеся) системы управления, роль человека в которых должна быть сведена только к контролю за ее работой. В качестве примера абстрактной многоуровневой системы управления на рис. 8 представлена трехуровневая система управления сложным объектом с разветвленными технологическими связями между установками. Отдельные технологические установки управляются децентрализованно с пунктов управления 1…7. Это I уровень управления. С пунктов 1…7 соответственно управляются объекты, имеющие существенную технологическую взаимосвязь. В связи с этим наиболее ответственные регулируемые параметры установок передаются на пункты управления 8…10 II уровня управления. Основные параметры, определяющие технологический процесс объекта в целом, могут управляться и контролироваться с пункта управления 11 III уровня.
Для I уровня при проектировании целесообразно предусматривать три режима управления:
1)командами, поступающими от уровня более высокого ранга;
2)командами, формирующимися непосредственно на I уровне;
3)командами, поступающими как с уровня более высокого ранга, так и формирующимися непосредственно на I уровне.
Объект управления
1 |
2 |
3 |
4 |
5 |
6 |
7 |
I
8 |
9 |
10 |
II
11
III
Рис. 8. Пример трехуровневой системы управления: I…III уровни управления
35