Материал: 1-35
Пропорционально-интегральные регуляторы с предварением (ПИД- регуляторы) отличаются от обычных ПИ-регуляторов наличием дифференцирующего звена, т.е. дополнительным регулирующим воздействием по первой производной от параметра, регулируемого по времени,
где Тп — время предварения.
ПИД-регуляторы рекомендуется применять для многоемкостных объектов с очень большим временем запаздывания.
-
Объект управления и его свойства
Процесс регулирования во многом зависит не только от регулятора, но и от свойств объекта: емкости, характера изменения нагрузки, времени разгона, самовыравнивания и запаздывания. В каждом объекте может одновременно регулироваться несколько разных величин.
Свойство объекта накапливать энергию, вещество и информацию называют аккумулирующей способностью. Эту способность характеризует в полной мере емкость объекта.
Под емкостью объекта понимают запас вещества или энергии, содержащейся в нем при заданном значении регулируемого параметра. Емкость может существовать только при наличии сопротивления выходу вещества или энергии из
объекта
[3].
ЗХС
Эхе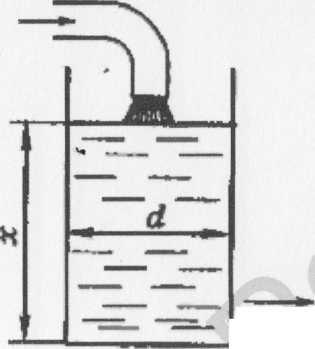
 Чем
больше емкость объекта, тем меньше
скорость изменения параметра при
одном и том же изменении количества
подаваемого (расходуемого) вещества
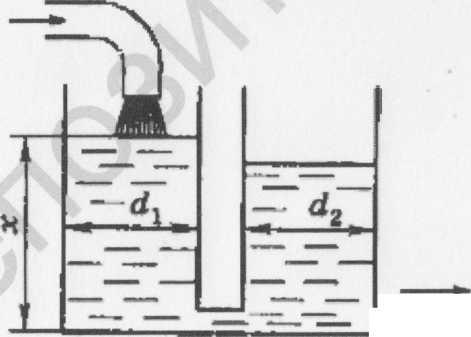
(энергии). Объекты могут быть одноъёмкостными
(рис. 1.7) и многоъёмкостными (рис. 1.8).
Чем
больше емкость объекта, тем меньше
скорость изменения параметра при
одном и том же изменении количества
подаваемого (расходуемого) вещества
(энергии). Объекты могут быть одноъёмкостными
(рис. 1.7) и многоъёмкостными (рис. 1.8).
Емкость объекта определяет такую характеристику, как время разгона.
Временем разгона объекта называют период, в течение которого регулируемый параметр изменяется от исходной величины до величины, соответствующей номинальной (расчетной) нагрузке объекта при условии, что скорость поступления регулирующей среды в течение этого времени остается постоянной. Время разгона объекта может определяться экспериментально или расчетным путем.
 Одной
из наиболее существенных характеристик
объекта регулирования является
криваяразгона,
показывающая изменение регулируемого
параметра в каждый равный промежуток
времени после однократного возмущения.
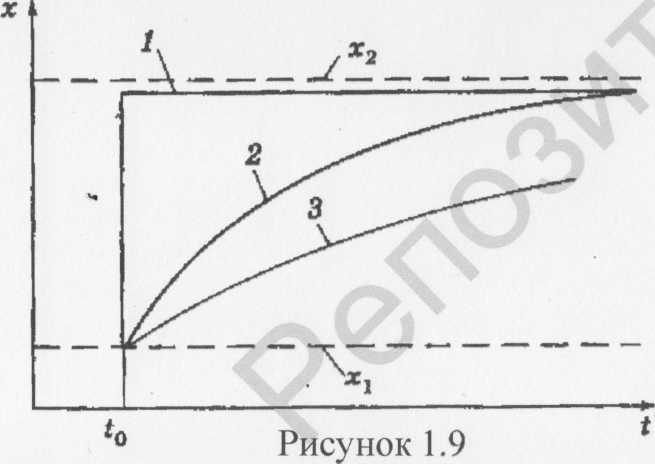
Экспериментальные кривые разгона для
объектов, в которых регулируется уровень,
представлены на рис. 1.9.
Одной
из наиболее существенных характеристик
объекта регулирования является
криваяразгона,
показывающая изменение регулируемого
параметра в каждый равный промежуток
времени после однократного возмущения.
Экспериментальные кривые разгона для
объектов, в которых регулируется уровень,
представлены на рис. 1.9.
Кривая 1 характеризует возмущающее воздействие, кривые 2 и 3 — восстановление уровня соответственно в объектах, показанных на рис. 1.7, 1.8. Пунктирные линии характеризуют соответственно начальный (хх) и установившийся (х2) уровни.
Для исследования свойств автоматической системы регулирования (АСР) составляют структурную схему из звеньев, которые характеризуются передаточными функциями. При изучении процессов в переходных режимах, происходящих в АСР, абстрагируются от технической природы конкретной регулируемой величины и устройств, входящих в схему, и рассматривают только математическую модель процесса регулирования.
Свойства звеньев определяются их статическими и динамическими характеристиками.
Статической характеристикой звена называют зависимость между входной и выходной величинами в различных установившихся состояниях равновесия. В общем случае связь между входными и выходными значениями определяют выражением
"вых- /(^вх)'
Динамической характеристикой элемента называют зависимость изменения во времени выходной величины от входной в переходном режиме. Эти характеристики элементов выражаются обычно дифференциальными уравнениями, называемыми передаточными функциями.
Реальные звенья обладают инерционностью. Поэтому передача воздействия выхода происходит не одновременно с воздействием входной величины, а с
некоторым временем запаздывания t0.
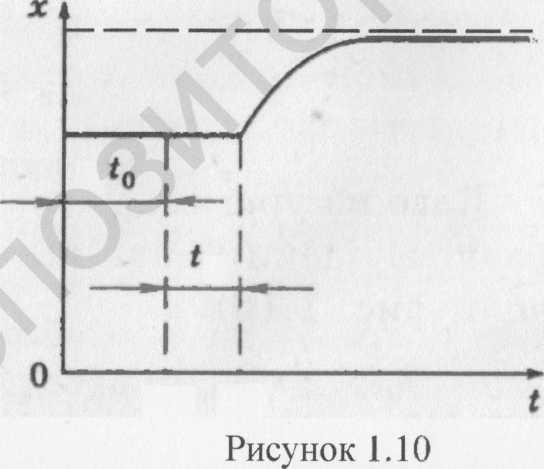
В двухъемкостных объектах (рис. 1.10) при скачкообразном нанесении возмущения в момент времени изменение параметров процесса начинается не сразу, а через промежуток времени ^ где (/— время передаточного запаздывания).
Передаточное запаздывание происходит из-за того, что всегда требуется некоторое время для прохождения сигнала от первичного преобразователя измерительной системы до регулятора, а затем от регулятора до объекта.
-
ЭЛЕМЕНТЫ АВТОМАТИКИ
-
Основные понятия и определения
-
Системы автоматики состоят из ряда связанных между собой элементов, выполняющих определенные функции и обеспечивающих в комплексе весь процесс улравления: получение первичной информации, усиление и измерение сигналов информации, преобразование их в управляющие сигналы и воздействие посредством исполнительных механизмов на регулирующие органы.
Все элементы любой группы имеют вход X и выход У. Входной величиной Овходным сигналом) элемента могут быть мгновенные значения физических величин (скорости, ускорения, давления, температуры, перемещения, тока, напряжения и др.), амплитудные значения синусоидальных или импульсных электрических величин, частота физических величин и т.д. Выходной величиной (выходным сигналом) может быть электрический, пневматический, гидравлический сигналы, различные по величине и характеру.
Режим работы элемента (системы) при постоянных во времени входной и выходной величинах называют установившимся или статическим режимом. Функциональная зависимость выходной величины у от входной х, выраженная математически или графически, называется статической характеристикой элемента у = /(х). Режим работы элемента при переменных во времени входной и выходной (или одной из них) величин называют динамическим.
По статической характеристике можно определить вид элемента (датчик, реле). Так, например, если статическая характеристика элемента непрерывна, т.е. величина у находится в определенной непрерывной зависимости от величины х, то такой элемент называют первичным преобразователем или датчиком. Если статическая характеристика элемента изменяется скачком, т.е. включение или отключение осуществляется при достижении входной величиной л; определенных, заранее установленных значений, то такой элемент называется реле.
Элементы автоматики характеризуются коэффициентом передачи, порогом чувствительности и погрешностью.
Коэффициент передачи элемента К представляет собой отношение выходной величины элемента^ к входной величине х, т.е. К=у/х. Коэффициент передачи датчика называют также чувствительностью. Если входная и выходная величины элемента имеют одинаковую физическую природу, то коэффициент передачи называют коэффициентом усиления.
Наименьшее (по абсолютной величине) значение входного сигнала, способное вызвать изменение выходного сигнала, называется порогом чувствительности.
Погрешность элемента появляется из-за неточной тарировки или градуировки элементов в процессе их изготовления.
-
Преобразователи давления жидкостей и газов в перемещение
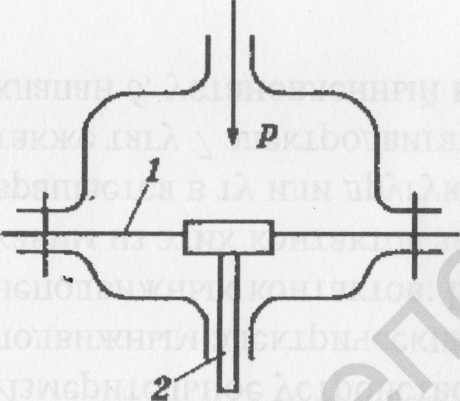 Для
преобразования давления, расхода
жидкости или.газа в линейное (угловое)
перемещение или угловую скорость
вращения выходного механического
элемента применяют гидромеханические
или пневмомеханические
преобразователи,
которые по принципу действия могут быть
упругими и поплавковыми. В свою очередь,
упругие преобразователи по исполнению
могут быть мембранными, сильфонными и
трубчатыми.
Для
преобразования давления, расхода
жидкости или.газа в линейное (угловое)
перемещение или угловую скорость
вращения выходного механического
элемента применяют гидромеханические
или пневмомеханические
преобразователи,
которые по принципу действия могут быть
упругими и поплавковыми. В свою очередь,
упругие преобразователи по исполнению
могут быть мембранными, сильфонными и
трубчатыми.
На рис. 2.1 представлена схема мембранного преобразователя с гибкой мембраной (диафрагмой) в виде круглой пластины 7, выполненной из упругого материала (стали, резины). Под воздействием приложенного давления р мембрана прогибается, заставляя шток 2 смещаться на величину, пропорциональную приложенному давлению.
Силъфонные преобразователи (рис. 2.2) используют в тех случаях, когда необходимо получить значительные перемещения, достигающие нескольких сантиметров. Под воздействием приложенного давления р сильфон (упругая гофрированная трубка) 1 сжимаются, перемещая шток 2. При уменьшении давления сильфон распрямляется под действием пружины 3.
і
І І
Рисунок
2.2
Р
Рисунок
2.3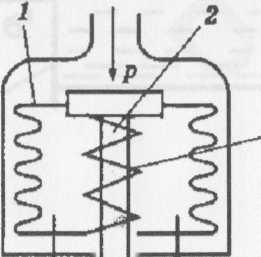
1
Откуда
у
2
Гидравлические
и пневматические
преобразователи
преобразуют скорость течения, расход
в давление или расход жидкости (газа).
По принципу действия они могут быть
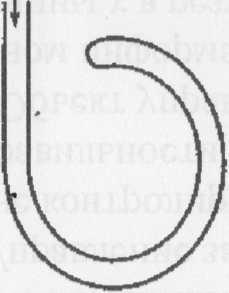
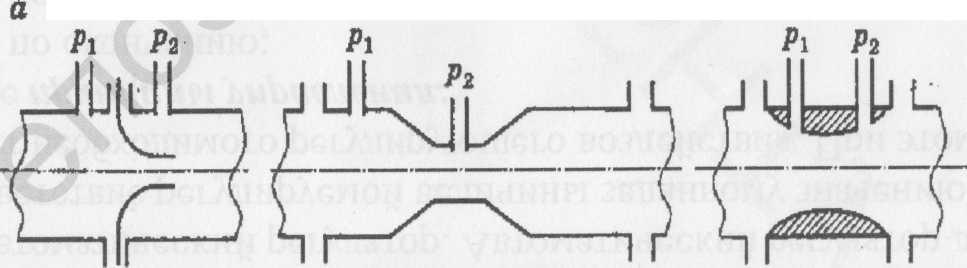
струйными и дроссельными. Примером
струйного
преобразователя
является датчик скорости потока жидкости
или газа— «трубка
Пито»
(рис. 2.4). Датчик представляет собой
изогнутую трубку 7, входное сопло которой
повернуто навстречу потоку 2. Давление
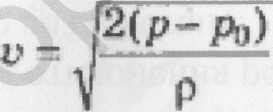
в трубке складывается из статического
давления рС)
и динамического давления р,
пропорционального
квадрату скорости потока V/
![]()
_| скорости тел, движущихся в жидкости или газе, например самолетов.
1
я
об
І
1
Рі
Р2
Рисунок
2.5
Примером
дроссельных
преобразователей является
диафрагма 1,
установленная в трубопроводе 2 (рис.
2.5). Кроме диафрагм применяют устройства,
вызывающие местное сужение потока:
диафрагмы, сопла (рис. 2.6, а), трубы Вентури
и Фостера (рис. 2.6, б, в).
Вместе с тем диафрагма по сравнению с другими стандартными сужающими устройствами характеризуется наибольшей простотой. При протекании по трубопроводу потока жидкости (газа) возникает перепад давлений Ар = р{ - р2 до и после сужающего устройства. Перепад давлений Ар — связан с объемным расходом 0о6.
б в
Для преобразования температуры в перемещение применяют биметаллические пластинчатые пружины. Принцип действия таких преобразователей основан на однозначной зависимости между измеряемой температурой и деформацией чувствительного элемента первичного преобразователя — биметаллической пластины — под действием температуры (рис. 2.7). Биметаллическая пластина состоит из двух соединенных пайкой или сваркой металлических слоев с различными коэффициентами линейного расширения.