Материал: Тех Мех Реферат + Задача
Рис. 7
Штифты изготавливают из сталей 45, А12, У8. При особых условиях работы соединения штифты могут изготавливаться из других материалов.
Достоинства штифтовых соединений заключаются в простате конструкции и технологии изготовления штифтов, в простате сборки и разборки данных соединений.
Главными недостатками штифтовых соединений являются значительное ослабление сечения вала отверстием под штифт и необходимость точной обработки этого отверстия во избежание изгиба штифта или его выпадения, также нежелательна многократная сборкаразборка, т.к. нарушается вид и точность соединения. Поэтому диаметр штифта (d) для вала диаметром (dв) задают из соотношения d (0,2…0,25) dв, а затем при необходимости проверяют на сдвиг (срез).
Шпоночные соединения
Шпоночные соединения служат для передачи вращающего (крутящего) момента от вала к ступице насаженной на него детали (зубчатого колеса, шкива, муфты и др.) или наоборот – от ступицы к валу. Шпоночные соединения осуществляют с помощью вспомогательных деталей – шпонок, устанавливаемых в пазах между валом и ступицей.
Достоинствами шпоночных соединений являются простота, надежность конструкции, невысокая стоимость, удобство сборки и разборки, а недостатками – ослабление вала и ступицы шпоночными пазами, неустойчивость положения шпонки в пазах (выворачивание шпонки) и трудность обеспечения взаимозаменяемости, повышенные требования к точности изготовления, отсутствие фиксации деталей в осевом направлении.
В приборостроении применяют в основном соединения призматическими (рис. 8, а), сегментными (рис. 8, б) и цилиндрическими (рис. 8, в) шпонками. Клиновые шпонки в точных механизмах не применяют. Конструкция и форма шпонки связаны с технологичностью изготовления пазов под шпонку. Пазы на валах фрезеруют, а в ступицах – прорезают протяжками.
в
б
а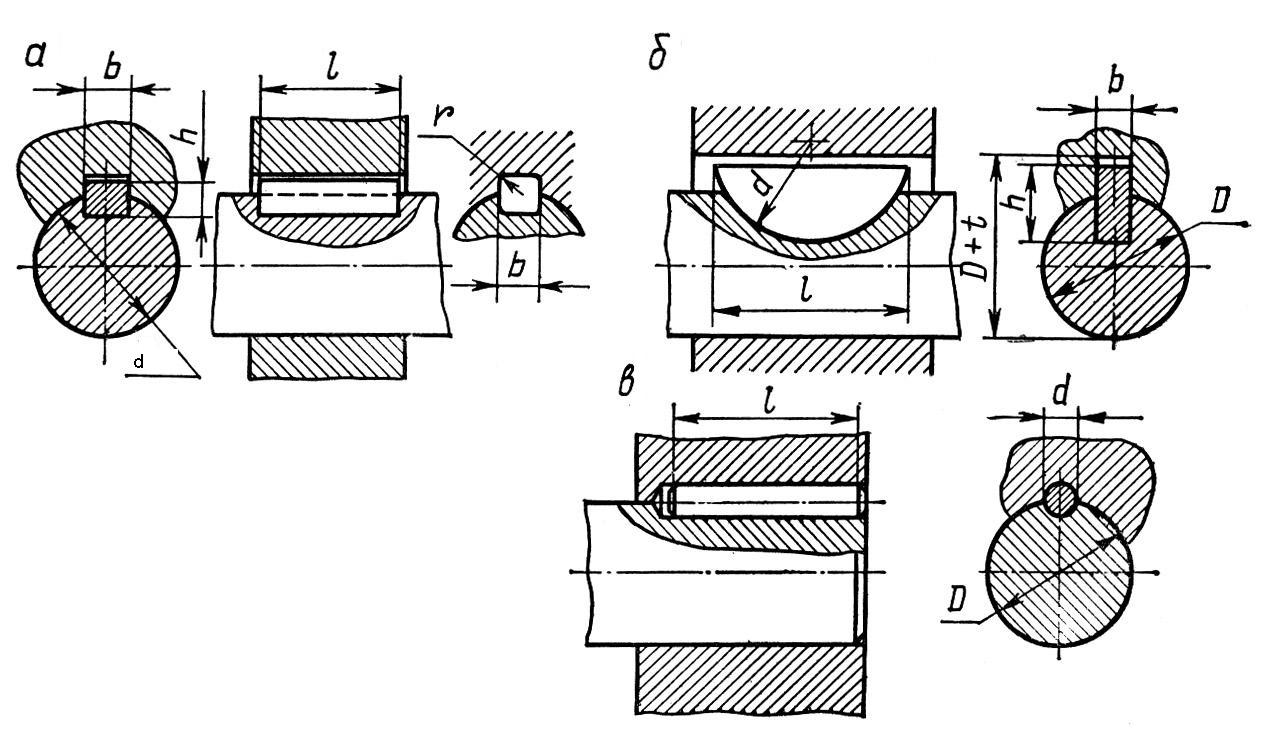
Рис. 8
Шпонки могут применять в качестве направляющих, обеспечивающих легкое перемещение деталей вдоль вала. Нагрузку у шпонок воспринимают боковые поверхности, которые сопрягаются с пазами по соответствующим посадкам. Призматическую шпонку с валом обычно соединяют по переходной посадке, а со ступицей – по посадке с зазором. Это препятствует перемещению шпонки вдоль вала и компенсирует с помощью зазора неточности размеров, формы и взаимного расположения пазов. Такой характер соединения обеспечивает достаточную точность центрирования вала и ступицы. В радиальном направлении предусматривается зазор.
Призматические шпонки имеют прямоугольное сечение, они могут быть с округленными, плоскими и смешанными торцами. Паз под шпонку на валу делают на глубину около 0,6 от ее высоты, а паз во втулке – на длину всей ступицы. Ширина и высота шпонки определены ГОСТом и выбираются в зависимости от диаметра вала. Размеры высоты и ширины стандартных шпонок подобраны так, что прочность на сдвиг обеспечивается с избытком, и при необходимости проверку шпонок на прочность проводят на деформацию смятия.
Сегментные шпонки требуют более глубоких пазов в валах, что уменьшает их прочность. Их применяют в случае передачи незначительных усилий, работают они как призматические, но более удобны в изготовлении.
Цилиндрические шпонки чаще всего используют для закрепления деталей на конце вала. Отверстие для шпонки обрабатывают в соединяемых деталях (вал и ступица) совместно. Шпонка устанавливается с натягом.
Шпоночные соединения применяют обычно при передаче значительных вращающих моментов при диаметре вала не менее 6 мм. В кинематических передачах и передачах с высоким требованием по точности рекомендуют использовать штифтовые соединения.
Шпонки изготавливают из среднеуглеродистых сталей 40, 45, Ст6.
Шлицевые соединения
Шлицевые соединения служат для передачи значительного вращающего момента между валами и установленными на них деталями.
Шлицевое соединение можно условно представить как многошпоночное, шпонки которого выполнены вместе с валом. С помощью этого соединения можно обеспечить как подвижное (с осевым относительным перемещением), так и неподвижное скрепление деталей. По сравнению со шпоночными шлицевые соединения имеют значительно большую нагрузочную способность, прочность валов, точность центрирования и направления ступиц в подвижных соединениях.
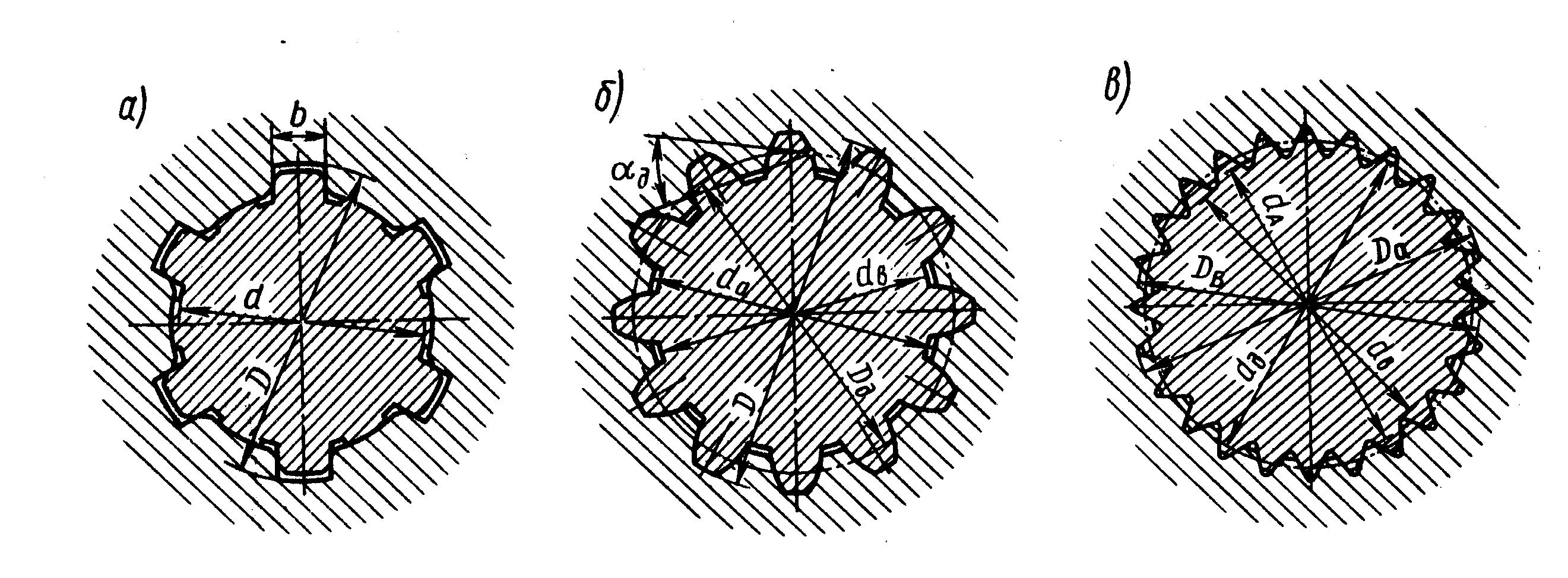
По форме поперечного сечения шлицев различают прямобочные (рис. 9, а), эвольвентные (рис. 9, б) и треугольные (рис. 9, в) шлицевые соединения.
Наибольшее распространение получили прямобочные шлицевые соединения, выполненные с четным числом шлицев (6, 8, 10). Число шлицев z должно быть не менее 6 и располагаться они должны симметрично. Центрирование возможно по наружному диаметру D, по внутреннему d и боковым поверхностям. Центрирование по наружному диаметру рекомендуется для неподвижных соединений, по внутреннему диаметру – для подвижных соединений, по боковым граням – при больших передаваемых нагрузках и низкой точности соединения.
а
б
в
Рис. 9
Эвольвентное шлицевое соединение (рис. 9, б) отличается от прямобочного повышенной точностью центрирования и прочностью. Центрирование осуществляют по боковым сторонам, реже – по наружному диаметру. Число зубьев z также рекомендуют 6.
Соединение с треугольными шлицами (рис. 9, в) применяют для неподвижных соединений при небольших нагрузках и тонкостенных конструкциях. Число шлицев z = 20 … 70, углы впадин вала равны 60, 72 и 90. Центрирование осуществляют только по боковым граням.
Задача
Для вращения вала
перистальтического насоса рассчитать
одноступенчатый зубчатый механизм с
цилиндрическими зубчатыми колесами.
Заданы момент
![]() = 0,5
Н∙м на выходном валу механизма (момент
сопротивления) и частота вращения
= 0,5
Н∙м на выходном валу механизма (момент
сопротивления) и частота вращения
![]() = 240
мин-1 выходного вала зубчатого
механизма, а также передаточное отношение
механизма i= 5,33.
Требуется выполнить расчет геометрических
параметров (d,
= 240
мин-1 выходного вала зубчатого
механизма, а также передаточное отношение
механизма i= 5,33.
Требуется выполнить расчет геометрических
параметров (d,
![]() ,
,
![]() ,
h,
,
h,
![]() ,
,
![]() ,
b, а) шестерни и
ведомого колеса, определить крутящие
моменты на всех валах, окружную силу
,
b, а) шестерни и
ведомого колеса, определить крутящие
моменты на всех валах, окружную силу
![]() в зацеплении, коэффициент полезного
действия
в зацеплении, коэффициент полезного
действия
![]() зубчатого зацепления, мощность
зубчатого зацепления, мощность
![]() и частоту вращения
и частоту вращения
![]() электродвигателя. Уточнить тип зубчатой
передачи (прямозубая или косозубая) по
величине окружной скорости v
в зубчатом зацеплении.
электродвигателя. Уточнить тип зубчатой
передачи (прямозубая или косозубая) по
величине окружной скорости v
в зубчатом зацеплении.
Кинематическая схема механизма к задаче приведена на рисунке
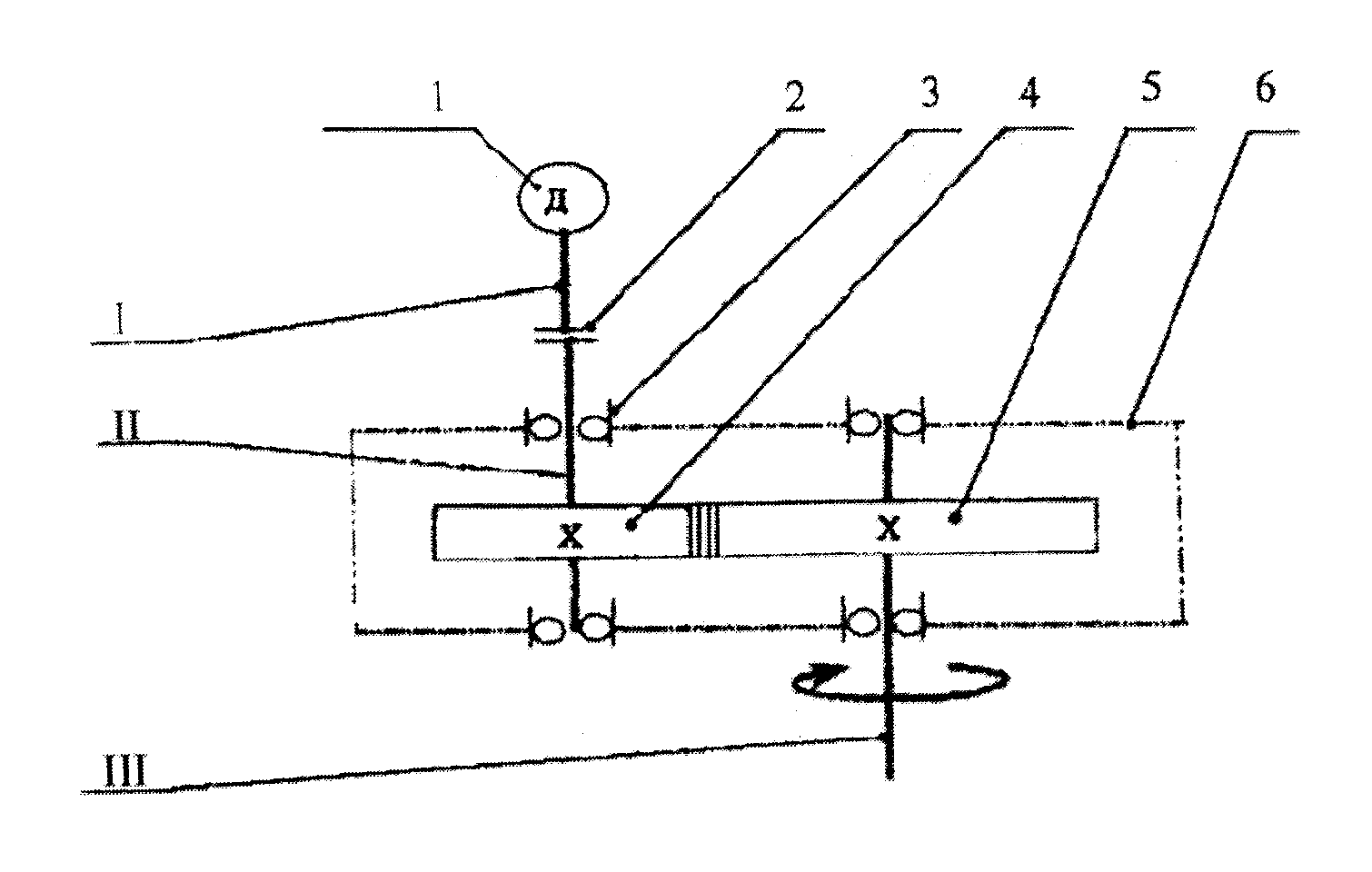
Кинематическая схема механизма:
1 электродвигатель; 2 муфта; 3 опора качения; 4 шестерня (ведущее зубчатое колесо); 5 ведомое зубчатое колесо; 6 корпус; I вал электродвигателя; II ведущий вал; III выходной вал.
Рассчитываемый механизм служит для уменьшения скорости вращения электродвигателя в i число раз и состоит из пары находящихся в зацеплении цилиндрических зубчатых колес (шестерни и колеса). Зубчатые колеса устанавливаются на валах, которые поддерживаются в требуемом положении опорами. Каждый вал имеет две опоры (скольжения и качения), закрепленные в корпусе. Быстроходный вал редуктора соединен с валом электродвигателя муфтой. В качестве опор принимаем подшипники качения.
Ориентировочно определим требуемую мощность электродвигателя, приняв предварительно значения КПД:
КПД зубчатой
передачи
![]() =
0,9;
=
0,9;
КПД подшипника
качения
![]() =
0,99;
=
0,99;
КПД муфты
![]() =
0,97.
=
0,97.
![]() [Вт],
(1)
[Вт],
(1)
где k коэффициент запаса, учитывающий необходимость преодоления динамических нагрузок в момент разгона, принимаемый равным 1,02 … 1,1;
требуемая мощность на выходном валу, Вт;
![]() коэффициент
полезного действия электромеханического
привода для выбранной схемы он равен
коэффициент
полезного действия электромеханического
привода для выбранной схемы он равен
![]() ,
(2)
,
(2)
=0,97*0,994 0,9= 0,8386.
Требуемая мощность на выходном валу рассчитывается по формуле:
![]() [Вт],
(3)
[Вт],
(3)
где ![]() момент на выходном
валу, Н∙м;
момент на выходном
валу, Н∙м;
![]()
угловая скорость
выходного вала, рад/с.
угловая скорость
выходного вала, рад/с.
Скорость вращения выходного вала в рад/с равна
![]() ,
(4)
,
(4)
где ![]() угловая скорость
выходного вала в об/мин.
угловая скорость
выходного вала в об/мин.
=(2*3,14*240)/60=25,12 рад/с.
Подставив значения , , в формулу (1) и приняв k =1,1 получим
![]() ,
(5)
,
(5)
=(1,1*0,5 *25,12)/0,8386=16,47 Вт.
Частота вращения электродвигателя
![]() [об/мин],
(6)
[об/мин],
(6)
где i передаточное отношение механизма.
![]() =240*5,33=1279,2
об/мин.
=240*5,33=1279,2
об/мин.
Из серии двигателей, имеющих скорости вращения 1250, 1280, 1300 об/мин выбираем электродвигатель с n = 1280 об/мин и мощностью Р ≥17 Вт.
Выбираем число
зубьев
![]() шестерни. Так как
шестерни. Так как
![]() =17,
а рекомендуемое значение числа зубьев
шестерни 1830, принимаем
=20.
=17,
а рекомендуемое значение числа зубьев
шестерни 1830, принимаем
=20.
Число зубьев зубчатого колеса определим по формуле
![]() ,
(7)
,
(7)
![]() =20*5,33=106,6.
=20*5,33=106,6.
Так как колесо должно иметь целое число зубьев, примем =107.
Тогда фактическое передаточное отношение зубчатой передачи
![]() =107/20=5,35.
=107/20=5,35.
Относительная погрешность передаточного отношения зубчатой передачи
![]() [%],
(8)
[%],
(8)
![]() =((5,335,35)/5,33)*100%=0,37%.
=((5,335,35)/5,33)*100%=0,37%.
Допустимая погрешность передаточного отношения не должна превышать 3,5%.
Диаметр ведущего
вала, т. е. вала шестерни, принимают
близким по размеру диаметру вала
двигателя. Будем считать, что
![]() 3
мм.
3
мм.
Выберем значение
модуля m зацепления
из стандартного ряда модулей (0,15; 0,2;
0,25; 0,3; 0,4; 0,5; 0,6; 0,8; 1,0; 1,25; … мм). Применение
малых модулей позволяет уменьшить
габариты колес или при сохранении
габаритов увеличить плавность передачи
за счет увеличения числа зубьев. Примем
m = 0,5,
чтобы выполнялось условие, при котором
диаметр окружности впадин зубьев
шестерни был бы больше диаметра ее
ступицы, т. е.
![]() > 2
> 2![]() .
.
Предполагая прямозубый тип зубчатых колес, определим диаметр делительной окружности колеса (ведомого звена):
![]() [мм],
(9)
[мм],
(9)
![]() =0,5*107=53,5
мм.
=0,5*107=53,5
мм.
Линейная скорость зубчатого колеса в зацеплении
![]() [м/с],
(10)
[м/с],
(10)
v =(25,12*53,5)/(2*103)=0,67 м/с.
При линейных скоростях v < 6 м/с принимают тип передачи прямозубая.
У зубчатых колес со стандартной (нормальной) высотой зуба коэффициент головки зуба *= 1, а коэффициент радиального зазора с* зубьев в зацеплении зависит от модуля и равен
с*=0,5 при m ≤0,5 мм;
с*=0,35 при 0,5<m<1,0 мм;
с*=0,25 при m ≥1,0 мм.
Высота головки зубьев колес
= *∙m [мм], (11)
=1*0,5=0,5 мм.
Высота ножки зубьев колес
=m( *+с*) [мм], (12)
=0,5(1+0,5)=0,75 мм.
Диаметры делительных окружностей зубчатых колес:
шестерни
![]() [мм],
(13)
[мм],
(13)
![]() 0,5*20=10
мм.
0,5*20=10
мм.
колеса
[мм], (14)
![]() 0,5*107=53,5
мм.
0,5*107=53,5
мм.
Диаметры окружностей вершин зубьев колес:
шестерни
![]() [мм],
(15)
[мм],
(15)
![]() =10+2*0,5=11
мм.
=10+2*0,5=11
мм.
колеса
![]() [мм],
(16)
[мм],
(16)
![]() =53,5
+2*0,5=54,5 мм.
=53,5
+2*0,5=54,5 мм.
Диаметры окружностей впадин зубьев колес:
шестерни
![]() [мм],
(17)
[мм],
(17)