Материал: Система автоматического регулирования электровоза ВЛ80р
![]()
![]()
![]()
![]() число витков катушки главных
полюсов.
число витков катушки главных
полюсов.
Учитывая, что наибольшая часть
индуктивности всей цепи тягового двигателя сосредоточена в его обмотке
возбуждения, можно принять
![]() , (11)
, (11)
![]() , (12)
, (12)
Отношение ![]()
![]() находится по кривой намагничивания
для тягового двигателя, размерность магнитного потока
находится по кривой намагничивания
для тягового двигателя, размерность магнитного потока ![]()
![]() Вб.
Вб.
.2.2 Тяговый двигатель в режиме генератора
При рекуперативном торможении тяговый двигатель переводится в режим генератора, как правило, с независимым возбуждением (в системах импульсного регулирования при электрическом торможении может сохраниться последовательное возбуждение).
При рекуперативном торможении используются оба канала воздействия: изменение подведенного, противодействующего со стороны сети напряжения (инвертора) и возбуждения.
Таким образом, тяговый двигатель,
как объект регулирования в системах ЭПС, может в линеаризованном виде
приниматься звеном первого или второго порядков, однако числовые значения
входящих в передаточные функции параметров зависят от выбранных сигналов входа
и выхода и способа возбуждения. Возможны и уточненные, но более сложные
математические модели тягового двигателя .
.3 ДАТЧИКИ
В зависимости от выбранных или заданных параметров (контролируемых величин) выбираются датчики: тока, напряжения, скорости, давления, силы и т. п. Необходимо иметь в виду, что подавляющее большинство систем авторегулирования и автоуправления (а на ЭПС - практически все) строится на электрическом принципе. Поэтому независимо от физической природы контролируемой величины выходной сигнал датчика, как правило, один: электрическое напряжение в вольтах. Таким образом, датчики органически включают элемент преобразования сигналов.
В автоматизированных системах
управления ЭПС по току и скорости требуются датчики соответствующих величин.
Если управление ведется по тяговому (тормозному) усилию, то информацию об этом
получают косвенным путем.
3.3.1 Датчики тока
В качестве датчиков переменного тока используют измерительные трансформаторы. Датчики постоянного тока на ЭПС с целью гальванической развязки высоковольтных цепей и управления выполняют в виде трансформаторов постоянного тока (ТПТ) на базе магнитных усилителей. На электровозе ВЛ80р в цепях измерения используются датчики тока (ДТ-039) со следующими техническими данными:
напряжение питания 127 В;
коэффициент трансформации 1240 мА/А;
сопротивление нагрузки 44 Ом;
номинальный первичный ток 1100 А;
режим работы длительный.
3.3.2 Датчики скорости
В системах автоуправления ЭПС используются тахогенераторные датчики скорости, устанавливаемые в буксовом узле и механически соединенные с осью колесной пары.
Внешнюю характеристику
тахогенератора можно считать линейной
![]() (13)
(13)
датчик в целом - безынерционным, а
передаточный коэффициент ![]() является,
по существу, масштабным коэффициентом, переводящим скорость (км/ч или м/с) в
вольты. При проектировании можно условно считать, что километру в час
соответствует один В выходного напряжения.
является,
по существу, масштабным коэффициентом, переводящим скорость (км/ч или м/с) в
вольты. При проектировании можно условно считать, что километру в час
соответствует один В выходного напряжения.
3.3.3 Датчики силы
Непосредственное измерение силы (тяги и торможения) хотя принципиально и возможно с помощью тензометрических или подобных им устройств, однако в эксплуатационных условиях на ЭПС такие датчики еще не нашли практического применения. Поэтому информацию о силах тяги или торможения получают косвенным путем, для чего используются функциональные преобразователи.
Рис. 4
Так, например, информацию о величине
тормозной силы можно получить, выполнив в соответствии с выражением
![]() , (14)
, (14)
две операции: функциональное преобразование по нелинейному закону тока возбуждения Iв в магнитный поток Ф; перемножение магнитного потока и тока якоря с учетом масштабных коэффициентов. Функционально датчик силы состоит из нескольких элементов (рис. 6), чаще всего нелинейных, взаимодействующих между собой на принципе вычислительных устройств непрерывного действия. Часто операции функционального преобразования и перемножения совмещаются в одном устройстве.
Поскольку для исполнения
функциональных преобразователей используются быстродействующие (часто -
электронные) элементы, в динамическом режиме их можно считать безынерционными.
.4 ЗАДАЮЩИЕ УСТРОЙСТВА (ЗАДАТЧИКИ)
В качестве задающих элементов используются устройства, у которых выходной сигнал Uвых изменяется в зависимости от положения какого-либо перемещающегося элемента, приводимого в движение чаще всего вручную или автоматически по заданной программе. Задатчиками могут быть потенциометры и регулируемые резисторы, поворотные трансформаторы, сельсины.
Для потенциометра (рис. 6,а)
выходной сигнал ![]() (при
равномерном распределении сопротивления по длине), для сельсина (рис. 7,б),
работающего в режиме задатчика,
(при
равномерном распределении сопротивления по длине), для сельсина (рис. 7,б),
работающего в режиме задатчика,
![]() ,
,
где k - коэффициент, зависящий от параметров сельсина;
![]() - угол отсчета, при этом за
исходное положение задатчика принимается такое, при котором Uвых=0, то
есть
- угол отсчета, при этом за
исходное положение задатчика принимается такое, при котором Uвых=0, то
есть ![]() ,
, ![]() .
.
Рис. 5
Инерционностью задающих устройств,
как правило, пренебрегают, так как переходный процесс в системе управления
начинается после появления управляющего сигнала, то есть выходного сигнала
задатчика.
.5 ЭЛЕМЕНТЫ СРАВНЕНИЯ ИЛИ
КОМПАРАТОРЫ
Элементы сравнения представляют собой вычислительные устройства автоматики, выполняющие операцию вычитания для получения сигнала разности между двумя входными (рис. 6). Чаще всего на элементе сравнения получают сигнал рассогласования (ошибки) между сигналами задающего устройства и обратной связи (датчика).
Простейшие элементы сравнения
напряжений выполняются по схемам рис. 6,в, г, реализующим операцию:
![]() , (15)
, (15)
Принципиально операция сравнения
может быть выполнена на любом устройстве, имеющем более одного входа (магнитные
или электромашинные усилители и т.п.).
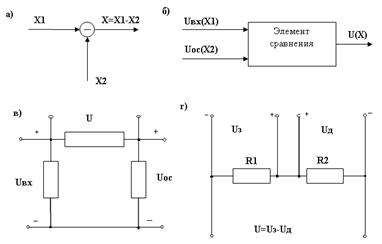
Рис. 6
Особенностью потенциометрических
элементов сравнения, подобных изображенным на рис. 6, в, г, является их
безынерционность, в то время как обмотки управления магнитных и машинных
усилителей обладают определенной инерционностью.
3.6 УСИЛИТЕЛИ
Следует различать понятия: усилитель, как конструктивный узел (магнитный, машинный и т.п.) и как элемент по функциональному назначению в общей схеме автоматики. Так, например, магнитный усилитель в зависимости от способа его использования может выполнять функции датчика (тока, напряжения), вычислительного элемента, усилителя, фазорегулятора и т.п.
Усилителем мощности (или просто усилителем) называется устройство, в котором мощность выходного сигнала превышает мощность входного. Эффект усиления по мощности достигается в усилителях за счет энергии некоторого вспомогательного источника (рис. 7), то есть входной сигнал усилителя хвх лишь управляет передачей энергии от источника на выход усилителя.
В зависимости от характера
вспомогательного источника энергии усилители могут быть механическими,
гидравлическими, пневматическими, электрическими и т. д. В устройствах
автоуправления ЭПС наибольшее распространение получили электрические усилители
с подвижными частями (реле, контакторы, электромашинные) и усилители, не
имеющие подвижных частей (электронные, магнитные и т.п.).
xвх
хвых
Рис 7
Среди основных характеристик любого усилителя необходимо выделить следующее: мощность, коэффициент усиления, инерционность. Коэффициент усиления по мощности всегда больше единицы, а по ее составляющим (по току и напряжению - для электрических усилителей) - любым, в том числе n меньше единицы. Инерционность усилителей определяется по их динамическим характеристикам. Если постоянная времени усилителя, характеризующая его инерционность, по крайней мере, на два порядка меньше наименьшей из постоянных времени других звеньев автоматической системы, то его можно считать безынерционным звеном.
К ним относятся: ламповые, транзисторные и тиристорные. Ламповые и транзисторные усилители могут работать как в режиме линейного преобразования сигналов (собственно усилитель), так и в ключевом(насыщения); тиристорные усилители работают только в режиме электронного ключа.
Наиболее часто используемая схема
транзисторного усилителя с общим эмиттером приведена на рис. 8 а, а его
выходная характеристика Ik(Iб) - на рис.
8 б где Uп - напряжение питания; Uу - напряжение управления; Uсм и Iсм
-напряжение и ток смещения для надежного закрытия транзистора. Как видно на
рис. 8 б, зависимость Ik (Iб)
характеризует коэффициент усиления по току
![]() , (16)
, (16)
а для линейной части характеристики
можно считать
![]() . (17)
. (17)
Рис. 8
Учитывая, что приращение эмиттерного
тока ![]() ,
,
![]() . (18)
. (18)
Коэффициент усиления по напряжению
![]() , (19)
, (19)
то есть даже при ![]() =
=![]() коэффициент
усиления по напряжению значительно больше единицы.
коэффициент
усиления по напряжению значительно больше единицы.
Коэффициент усиления по мощности
б =Iу
![]() . (20)
. (20)
При расчете транзисторного усилителя в проекте необходимо:
установить, по какому параметру требуется усиление (току, напряжению, мощности с учетом характера нагрузки);
по параметрам нагрузки в коллекторной цепи усилителя выбрать напряжение питания;
по максимальному току нагрузки
выбрать тип транзистора, сопротивление коллекторной цепи рассчитывается по
выражению
![]() , (21)
, (21)
Где ![]() и
и ![]() - сопротивление нагрузки и
эмиттерно-коллекторного перехода для выбранного типа транзистора;
- сопротивление нагрузки и
эмиттерно-коллекторного перехода для выбранного типа транзистора;
выбрав напряжение управления (оно
может быть и задано), по максимально базовому току (Iб м рис. 8 б) найти
![]() , (22)
, (22)
где ![]() - дополнительное сопротивление в
цепи управления.
- дополнительное сопротивление в
цепи управления.
Для обеспечения плавного
регулирования тока управления ![]() ,резистор
,резистор ![]() должен быть
регулируемым, если напряжение является стабильным
должен быть
регулируемым, если напряжение является стабильным ![]() является
стабильным.
является
стабильным.
3.6.2 Магнитные усилители (МУ)
Магнитный усилитель представляет собой статическое устройство, действие которого основано на использовании существенной нелинейности кривой намагничивания ферромагнитного материала.
Основной характеристикой МУ является
зависимость между токами нагрузки и управлении, .которая отображает коэффициент
усиления МУ по току (рис.9). МУ представляет собой катушку, включенную в сеть
переменного тока и расположенную на магнитопроводе, магнитный поток в котором
может усиливаться или ослабляться за счет подмагничивания катушкой постоянного
тока (управления). В соответствии с уравнением равновесия магнитодвижущих сил
![]()
![]() , (23)
, (23)
где Wн и Wу - число витков рабочей катушки и управления;
Коэффициент усиления по току
![]()
![]() , (24)
, (24)
Рис 9
Соответственно коэффициенты усиления:
по напряжению
![]()
![]() , (25)
, (25)
где Rн, Ry - сопротивления цепей нагрузки и управления;
по мощности
![]()
![]() , (26)
, (26)
Магнитный усилитель в режиме
фазорегулятора. Способность МУ резко изменять сопротивление цепи нагрузки при
насыщении используется в устройствах фазорегулирования ( БУРТ электровоза
ВЛ80р). Для увеличения наклона характеристики насыщения МУ собирается по схеме
с внутренней обратной связью (схема амплистата рис. 10).
Момент насыщения ![]() по отношению
к питающему напряжению (рис. 11) зависит от степени подмагничивания, то есть от
тока управления, так как
по отношению
к питающему напряжению (рис. 11) зависит от степени подмагничивания, то есть от
тока управления, так как
![]() (27)
(27)
Учитывая, что ![]() , можно
записать
, можно
записать
![]() . (28)
. (28)
Таким образом, момент (фаза) появления сигнала на выходе становится функцией тока управления.
Наличие нескольких обмоток
управления на сердечнике МУ дает возможность регулировать фазу от нескольких
сигналов управления, то есть МУ, как фазорегулятор, может одновременно быть и
решающим устройством.
3.6.3 Электромашинный усилитель
В устройствах автоматики общепромышленного назначения широко используются специализированные электромашинные усилители с поперечным полем.
Передаточная функция
электромашинного усилителя, как элемента автоматики, может быть найдена по двум
уравнениям электродинамики: