Материал: ПЗ-2 л
Міністерство освіти і науки України
Харківський національний університет
радіоелектроніки
Звіт з практичної роботи №2
з дисципліни “Прогнозування та моделювання в соціальній сфері”
з теми: “Формування прогнозів на основі методу кривих зростання(спадання)“
Харків 2019
Мета: формування прогнозів на основі методів кривих зростання (спадання), порівняльний аналіз отриманих результатів.
1.Вихідні дані
Для формування прогнозів на основі заданих методів було взято часовий ряд, наведений в таблиці 1.1:
Таблиця 1.1 – Заданий часовий ряд
Часовий Інтервал |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
Значення Часового ряду |
-855 |
-483 |
-227 |
-63 |
33 |
85 |
117 |
153 |
217 |
333 |
525 |
Часовий інтервал |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
21 |
|
Значення Часового ряду |
817 |
1233 |
1797 |
2533 |
3465 |
4617 |
6013 |
7677 |
9633 |
11905 |
|
2. Опис полінома першої степені (ппс)
Цей метод має такий вигляд:
![]() .
(2.1)
.
(2.1)
Перенесемо початку координат в середину ряду динаміки. Якщо до перенесення початку координат t дорівнювало 1,2,3, ..., то після перенесення: - для парного числа членів ряду t = ..., - 5; -3; -1; 1; 3; 5; ...; - для непарного числа членів ряду t = ..., - 3; -2; -1; 0; 1; 2; 3; ....
На рис 2.1 наведена графічна ілюстрація полінома першого степеню.
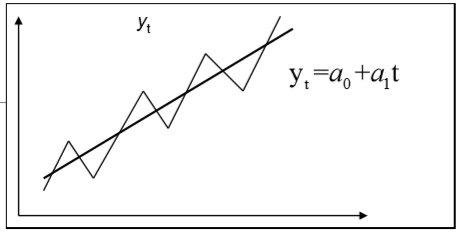
Рисунок 2.1 – Графічна ілюстрація полінома першого степеню
На рис.2.1 поліном першої степені зображується прямою і використовується для опису процесів, що розвиваються у часі рівномірно. Після перенесення початку координат сума непарних ступенів:
![]() .
(2.2)
.
(2.2)
Оцінки параметрів обчислюються за формулами:
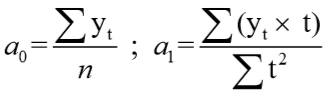 .
(2.3)
.
(2.3)
3.Опис полінома другої степені (пдс)
Цей метод має такий вигляд:
![]() .
(3.1)
.
(3.1)
Перенесемо початку координат в середину ряду динаміки. Якщо до перенесення початку координат t дорівнювало 1,2,3, ..., то після перенесення: - для парного числа членів ряду t = ..., - 5; -3; -1; 1; 3; 5; ...; - для непарного числа членів ряду t = ..., - 3; -2; -1; 0; 1; 2; 3; ....
На рис 3.1 наведена графічна ілюстрація полінома другого степеню:
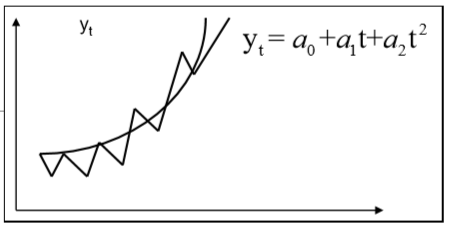
Рисунок 3.1 – Графічна ілюстрація полінома другого степеню
Поліном застосовується в тих випадках, коли процес розвивається рівноприскорено (тобто є рівноприскорене зростання або рівноприскорене зниження рівнів). Після перенесення початку координат сума непарних ступенів, наведена формула в пункті 2.2.
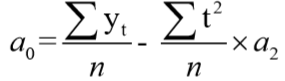
Оцінки параметрів обчислюються за формулами:
 .
(3.2)
.
(3.2)
 .
(3.3)
.
(3.3)
4.Опис експоненціальних кривих (ек)
Цей метод має такий вигляд:
![]() .
(4.1)
.
(4.1)
Якщо b>1, то крива зростає разом з ростом t, і падає, якщо b<1. Параметр a характеризує початкові умови розвитку, а параметр b - постійний темп зростання. Логаріфмуючи вираз, отримуємо: ln yt = ln a + t * ln b. Позначимо: ln a = A; ln b = B. Тоді ln yt = A + t*B. Для оцінювання невідомих параметрів можемо використовувати систему нормальних рівнянь для прямої. Нормальні рівняння будуються виходячи з мінімізації:
![]() (4.2)
(4.2)
Відповідно в нормальних рівняннях замість фактичних рівнів використовуються їх логарифми:
 (4.3)
(4.3)
Оцінки параметрів обчислюються за формулами:
 .
(4.4)
.
(4.4)
 .
(4.5)
.
(4.5)
5. Розрахунок похибки прогнозу
Оцінка точності прогнозів проводиться за такими ознаками:
Помилка прогнозу:
 (5.1)
(5.1)
Абсолютна помилка прогнозу:
 (5.2)
(5.2)
Середня абсолютна помилка прогнозу:
MAE
=
 ; (5.3)
; (5.3)
Відносна похибка прогнозу:
ℇj
= ( / ) * 100; (5.4)
/ ) * 100; (5.4)
Середня абсолютна відсоткова помилка:
MAPE
= ( *
* )
* 100%; (5.5)
)
* 100%; (5.5)
6.Середня відсоткова помилка:
MPE
=
 ; (5.6)
; (5.6)
7.Коефіцієнт детермінації:
 =
1 -
=
1 -
 . (5.7)
. (5.7)
6. Програмна реалізація полінома першої степені
Для того, щоб програмно реалізувати метод, описаний у розділі 2, спочатку було взято заданий часовий ряд (табл. 1.1), описаний у розділі 1. Його було позначено як масив Y[]. Потім створено масив часових інтервалів t[], який відповідає кількості значень часового ряду. Для формування прогнозу було використано формули (2.1), (2.2), (2.3), що було описані у розділі 2 даного звіту, і позначені у реалізації як Ymkzl, a1, a0. Далі, задля оцінки точності сформованого прогнозу було використано формули (5.1), (5.2), (5.3), (5.4), (5.5), (5.6), (5.7), що були описані раніше у пункті 5. Вони позначені у реалізації як emkzl, deltamkzl, MAEmkzl, Emkzl, MAPEmkzl, MPEmkzl, R2mkzl відповідно.
На рис. 6.1 наведена ілюстрація програмної реалізації полінома першої степені.
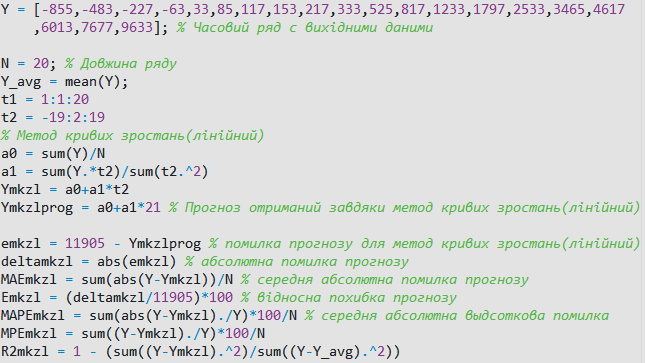
Рисунок 6.1 - Ілюстрація програмної реалізації полінома першої степені
7. Програмна реалізація полінома другої степені
Для того, щоб програмно реалізувати полінома другої степені, описаний у розділі 3, спочатку було взято заданий часовий ряд(табл. 1.1), описаний у розділі 1. Його було позначено як масив Y[]. Потім створено масив часових інтервалів t[], який відповідає кількості значень часового ряду. Для формування прогнозу було використано формули (3.1), (3.2), (3.3), (3.4) що були описані у розділі 3 даного звіту, і позначені у реалізації як Ymkzp, a1, a0,а2. Далі, задля оцінки точності сформованого прогнозу було використано формули (5.1), (5.2), (5.3), (5.4), (5.5), (5.6), (5.7), що були описані раніше в розділі 3. Вони позначені у реалізації як emkzp, deltamkzp, MAEmkzp, Emkzp, MAPEmkzp, MPEmkzp, R2mkzp відповідно.
На рис. 7.1 наведена ілюстрація програмної реалізації полінома другої степені.
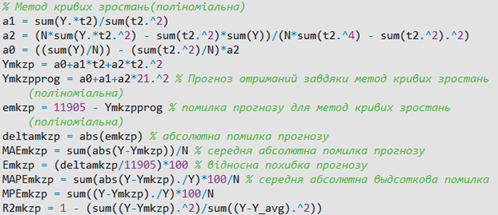
Рисунок 7.1 - Програмна реалізація полінома другої степені
8. Програмна реалізація експоненціальних кривих
Для того, щоб програмно реалізувати експоненціальні криві, описаний у розділі 4, спочатку було взято заданий часовий ряд(табл. 1.1), описаний у розділі 1. Його було позначено як масив Y[]. Потім створено масив часових інтервалів t[], який відповідає кількості значень часового ряду. Для формування прогнозу було використано формули (4.1), (4.2), (4.3), (4.4), (4.5) що були описані у розділі 4 даного звіту, і позначені у реалізації як Ymkze, a, b. Далі, задля оцінки точності сформованого прогнозу було використано формули (5.1), (5.2), (5.3), (5.4), (5.5), (5.6), (5.7), що були описані раніше в розділі 3. Вони позначені у реалізації як emkze, deltamst, MAEmkze, Emkze, MAPEmkze, MPEmkze, R2mkze відповідно.
На рис.8.1 наведена ілюстрація програмної реалізації експоненціальних кривих.
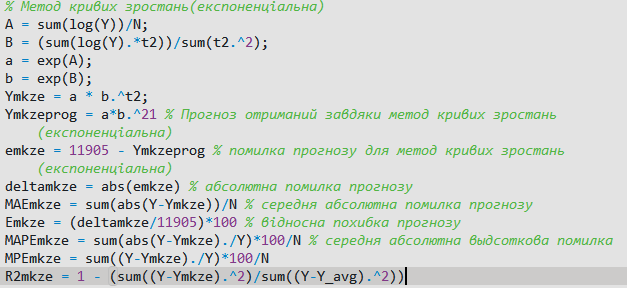
Рисунок 8.1 - Програмна реалізація експоненціальних кривих
9. Оцінка похибок прогнозів
Похибка прогнозів, описаних у розділах 2, 3 та 4 оцінюється за критеріями, що описані у розділі 5 та наведені у таблиці 9.1:
Таблиця 9.1 – Похибки результатів прогнозів
-
Метод


MAE
 ,
%
,
%MAPE, %
MPE
%
МКТ
1720
1720
2508
14,4
671
-671
-0,079
МСТ
5939
5929
1156
49,8
94,97
-158
0,743
ППС
5513,2
5513,2
1197,2
46,3
93,6
-139,4
0,749
ПДС
2125,2
2125,2
516,24
17,9
156,90
159.05
0,956
ЕК
7301,2 + 6562,1i
9816,7
1179,9
82,46
73,33
27,531 – 61,243i
0,89619 – 0,52429i