Материал: msu_lab2
Отчет по лабораторной работе № 2 по дисциплине «Моделирование систем управления»
на тему:
«Построение частотных характеристик и исследование устойчивости линейных систем»
Цель работы
Приобретение практических навыков исследования динамических систем на основе их имитационных моделей и изучение стандартных функций пакета MATLAB для исследования частотных характеристик и устойчивости линейных систем.
Подготовка к работе
1.Получение структурной аналоговой модели неминимально-фазового звена первого порядка
W ( p) = k1(1− pT1 )
1+0.5 pT1
В соответствии с вариантом k1 = 12, T1 = 0,4 с.
Представим передаточную функцию в виде:
W ( p) = Y ( p) U ( p)
Запишем дифференциальное уравнение для данной передаточной функции:
y +0.5T1 y& = k1 u −T1 u&
Перегруппируем слагаемые в уравнении так, чтобы слева были производные, справа – сигналы:
y& +2k1u& = 2Tk1 u −T2 y
1 1
Структурная аналоговая схема, соответствующая полученному уравнению, представлена на рис.1.1.
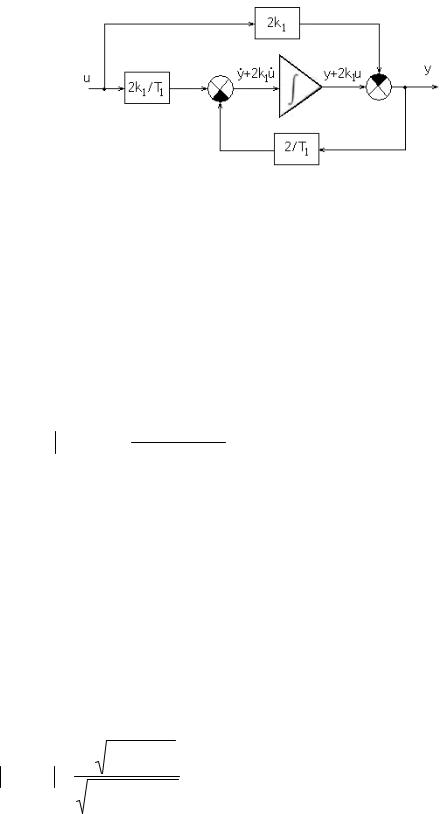
Рисунок 1.1 – Структурная аналоговая схема
2.Определение аналитических выражений для основных частотных характеристик исследуемого звена: амплитудно-частотной (АЧХ), логарифмической амплитудно-частотной (ЛАЧХ), фазо-частотной (ФЧХ), и амплитудно-фазовой
(АФХ).
Связь между передаточной функцией звена и его комплексным коэффициентом усиления:
W ( jω) =W ( p) p = jω = k+1(1− jωωT1 )
1 0.5 j T1
Выражение для АФХ звена:
W ( jω) = |
k1(1− jωT1 ) |
= |
k1(1− jωT1 )(1−0.5 jωT1) |
|
= |
|
|
|
|
||||||||
1+0.5 jωT |
|
|
) |
|
|
|
|
||||||||||
|
|
|
|
|
(1+0.5 jωT |
)(1 |
−0.5 jωT |
|
|
|
|
|
|||||
|
|
|
|
1 |
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
k |
|
− jωT −0.5 jωT |
−0.5(ωT ) |
2 |
|
|
k |
|
|
|
2 |
|
|
|
||
|
1 |
|
|
|
1−0.5(ωT ) |
|
|
|
−1.5 ωk1T1 |
||||||||
= |
1 |
|
|
1 |
1 |
1 |
|
|
= |
1 |
|
|
1 |
|
|
+ j |
|
|
|
|
1+0.25 (ωT )2 |
|
|
1+0.25 (ωT )2 |
|
1+0.25 (ωT )2 |
|||||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|
1 |
|
Выражение для АЧХ звена:
k 1+(ωT )2
A(ω) = W ( jω) = 1 ( 1 ) 1+ 0.5ωT1 2
Выражение для ФЧХ звена:
ψ(ω) = −arctgωT1 −arctg 0.5ωT1
2
3.Получение модели в форме уравнений состояния динамической системы с передаточной функцией
W ( p) = |
kр(1− pT1) |
|
(1+0,5 pT )(1 |
+ pT ) |
|
|
1 |
2 |
В соответствии с вариантом: kp = 12, T1 = 0,4 c, T2 = 5 c.
Получим математическую модель в форме уравнений состояния исследуемой динамической системы, используя метод канонического преобразования передаточной функции для случая простых корней.
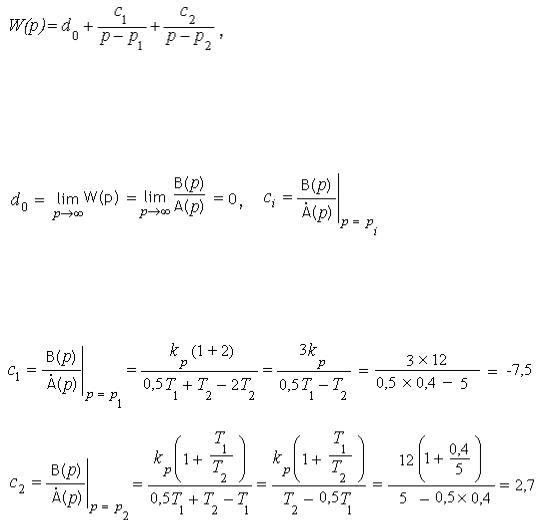
Выполним разложение исследуемой передаточной функции дробно-рационального вида на простые дроби:
W(p) = |
k р(1− pT1 ) |
|
= |
k р |
|
|
1− pT1 |
|
|
= |
B( p) |
||||
(1+0.5pT |
)(1+ pT |
) |
0.5 |
T T |
|
2 |
|
|
1 |
|
A( p) |
||||
|
1 |
2 |
|
|
|
1 2 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
p + |
|
p |
+ |
|
|
|
|
|
|
|
|
|
|
|
T |
T |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
1 |
|
|
2 |
|
|
|
где p1 = -2/T1 = -2/0,4 = -5; p2 = -1/T2 = -1/5 = -0,2 - корни характеристического уравнения системы А(р) = 0.
Коэффициенты могут быть определены исходя из следующих соотношений:
A&(p) = 1+0.5 pT1 + pT2 +0.5 p2T1T2 ′ = 0.5T1 +T2 + pT1T2
B(p) = k р 1− pT1
3
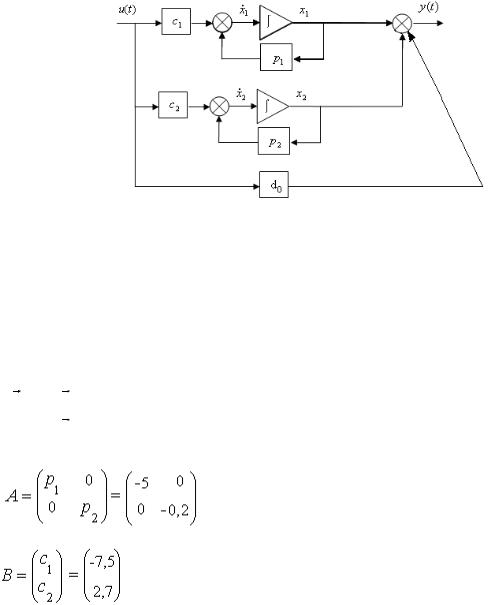
Уравнения состояния в канонической форме:
x&1 = p1x1 +c1 u
x&2 = p2 x2 +c2 uy = x + x
1 2
Структурная аналоговая схема рассматриваемой системы представлена на рис. 1.2.
Рисунок 1.2 – Структурная аналоговая схема
4.Получение уравнений состояния в матричной форме
Записанные в пункте 3 уравнения состояния можно представить в матричной форме:
• |
|
x = A x + B u |
|
|
|
y =C x + D u |
, где |
|
C = (1 1)
D = d0 = 0
5.Получение выражения для определения предельного значения коэффициента усиления системы kпред
4

Воспользуемся алгебраическим критерием Гурвица для получения аналитического выражения для расчета kпред.
Передаточная функция разомкнутой системы:
W(p) = |
|
|
|
|
k р(1− pT1 ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
(1+0.5pT |
)(1+ pT |
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Передаточная функция замкнутой системы: |
|
|
|
|
|
|
|
|||||||||||||||||||||||
Wз(p) = |
|
W |
( p) |
= |
|
|
|
|
|
|
k р(1− pT1 ) |
|
|
|
|
|
|
= |
||||||||||||||
|
+ |
W ( p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
1− pT |
|
|
||||||||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
р |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( |
|
1 ) |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
(1+0.5pT1 )(1+ pT2 |
) |
1+ |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
(1+0.5pT |
)(1 |
+ pT |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
|
|
|
= |
|
|
|
|
|
|
|
|
k р(1− pT1 ) |
|
|
|
|
= |
B( p) |
|
|
|
|
|
|
|
|
|
||||||||
(1 |
+0.5pT |
|
)(1+ pT |
) +k р(1− pT |
) |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
C( p) |
. |
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
1 |
|
|
2 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
Характеристический полином замкнутой системы: |
|
|
|
|
|
|
|
|||||||||||||||||||||||
C(p) =1+ pT +0.5 pT +0.5 p2T T |
+k |
р |
−k |
р |
|
pT = |
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
1 |
|
|
1 2 |
|
|
|
|
1 |
|
|
|
|
|
|
|
||||
= 0.5T T p2 |
+ 0.5T +T −k |
T |
p + 1+k |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
1 2 |
|
|
|
|
|
1 |
2 |
|
р 1 |
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
||||||
|
|
Определитель Гурвица: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
= |
0.5T +T −k |
T |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
1 |
|
|
2 |
|
р 1 |
1+k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
0.5T T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
1 2 |
|
|
|
|
р . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для обеспечения устойчивости системы необходимо и достаточно выполнение следующих условий:
1 = 0.5T1 +T2 −k рT1 > 0 ,
2 = 0.5T1 +T2 −k рT1 1+k р > 0
Используя данные условия, найдем аналитическое выражение для расчета kпред:
0.5T +T |
−k |
T > 0 |
|||
|
1 |
2 |
|
р 1 |
|
1+k |
р |
> 0 |
|
|
|
|
|
|
|
|
|
5