Материал: Методические указания по выполнению лабораторных работ № 4-6 по дисциплине «Информационные устройства и системы в робототехнике». Трубецкой В.А
ФГБОУ ВПО
«Воронежский государственный технический университет»
Кафедра электропривода, автоматики и управления
в технических системах
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
по выполнению лабораторных работ № 4-6 по дисциплине
«Информационные устройства и системы
в робототехнике»
для студентов направления
15.03.06 «Мехатроника и робототехника»
(профиль «Промышленная и специальная робототехника»)
очной формы обучения
Воронеж 2015
Составитель канд. техн. наук В.А. Трубецкой
УДК 621:338(075)
Методические указания по выполнению лабораторных работ № 4-6 по дисциплине «Информационные устройства и системы в робототехнике» для студентов направления 15.03.06 «Мехатроника и робототехника» профиль «Промышленная и специальная робототехника» очной формы обучения/ ФГБОУ ВПО «Воронежский государственный технический университет»; сост. В.А. Трубецкой. Воронеж, 2015. – 35 с.
Методические указания предусматривают систематизацию, закрепление и расширение теоретических знаний студентов по дисциплине «Информационные устройства и системы в робототехнике» и формирование практических навыков по расчету и выбору датчиков информационных систем, а также исследованию их характеристик.
Методические указания подготовлены в электронном виде в текстовом редакторе WORD и содержатся в файле МУИ ЛР 4-6.doc.
Ил. 8 . Библиогр.: 3 назв.
Рецензент канд. техн. наук, доц. А.К. Муконин
Ответственный за выпуск зав. кафедрой д-р техн. наук, проф. В.Л. Бурковский
Издается по решению редакционно-издательского совета Воронежского государственного технического университета
© ФГБОУ ВПО «Воронежский государственный технический университет», 2015
Лабораторная работа № 4
ИССЛЕДОВАНИЕ ФОТОЭЛЕКТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ
ЦЕЛЬ РАБОТЫ - изучение принципа действия и основных характеристик фотоэлектрических преобразователей угловых перемещений кодового типа, а также способов их использования в робототехнических устройствах.
2. Теоретические сведения
Преобразователи угловых и линейных перемещений широко используются в робототехнических системах в качестве датчиков обратной связи по положению.
Функции, выполняемые промышленными роботами, предъявляют, как правило, жесткие точностные, динамические и эксплуатационные требования к этим преобразователям.
Так, для угловых перемещений величина погрешности исчисляется минутами и секундами в диапазоне 360˚ а для линейных - единицами микрон. В настоящее время для преобразования перемещений применяются вращающиеся трансформаторы, индукционные редуктосины, круговые и линейные индуктосины, фазовые преобразователи угла с вращающимся модулятором, фотоэлектрические преобразователи и др.
В данной лабораторной работе изучаются фотоэлектрические преобразователи угла (ФПУ). Широкому применению этих преобразователей в промышленных роботах способствует отсутствие обмоток, возможность получения высокой точности за счет движения коэффициента электрической редукции при малых габаритах, различные методы преобразования угла в электрические сигналы и другие технологические и конструктивные показатели.
2.1. Основные разновидности ИГУ
Из фотоэлектрических преобразователей угла наибольшее распространение получили преобразователи считывания (ПС) и растровые интерполяторы (РИ). Первые осуществляют преобразование абсолютного значения угла в ход, вторые - приращение угла.
Основными элементами ФПУ являются модулирующий, или кодирующий, диск и фотоэлектрическая считывающая система. Последняя состоит из передающей и приемной частей. Передающая часть содержит источник излучения и оптическую систему, предназначенную для формирования параллельного потока, а приемная - индексную диафрагму и приемник излучения.
Модулирующий диск и индексная диафрагма представляют собой диски, изготовленные из оптического стекла или металла, расположенные соосно и параллельно друг другу. На обращенных друг к другу поверхностях стеклянных дисков печатным способом нанесены растровые дорожки из чередующихся прозрачных и непрозрачных участков. В металлических дисках для этого выполнены прорези. В качестве источников излучения в ФПУ чаще всего используются лампы накаливания и светодиоды. Лампы накаливания в сравнении со светодиодами имеют большую излучательную способность, работают в более широком диапазоне температур. Светоизлучающие диоды характеризуются малыми габаритами, высокой устойчивостью к механическим нагрузкам, большим сроком службы, большим КПД, небольшой потребляемой мощностью и высоким быстродействием. В качестве приемников излучения главным образом применяются кремневые фотодиодные матрицы.
Точность ФПУ характеризуется результирующей погрешностью преобразования. Все погрешности разделяются на флюктуационные, инструментальные, динамические и погрешности аналого-цифрового преобразования. Причиной возникновения флюктуационных погрешностей являются помехи, сопровождающие работу ФПУ. Инструментальные погрешности возникают вследствие конструктивно-технологических ограничений по точности изготовления, сборки, отладки и юстировки элементов ФПУ. Динамические погрешности обусловлены переходными процессами, а также изменением входного сигнала за время одного преобразования. Погрешность аналого-цифрового преобразования является следствием дискретизации и квантования входной величины и ее изменения за время преобразования.
2.2. Преобразователи считывания
В ПС информация о перемещении получается в виде цифрового кода, значения каждого разряда которого «0» и «1» задаются непрозрачными участками растровой дорожки и снимаются элементами фотодиодной матрицы. Модулирующий элемент n -разрядного ПС представляет собой диск, содержащий n дорожек, которые образуют так называемую кодовую маску.
На рис.1 показан пример 4-разрядного кодового диска с обычным двоичным кодом. Считывающие элементы (показаны на рисунке в виде черных прямоугольников) располагаются по радиусу. Младшему разряду двоичных чисел, получаемых в результате преобразования, соответствует внешнее кольцо, а старшему разряду - внутреннее. При вращении кодового диска считывающие элементы фиксируют появляющиеся под ними коды нулей и единиц. В результате каждому положению кодовой шкалы соответствует вполне определенное двоичное число.
Рис. 1. Двоичная кодовая маска |
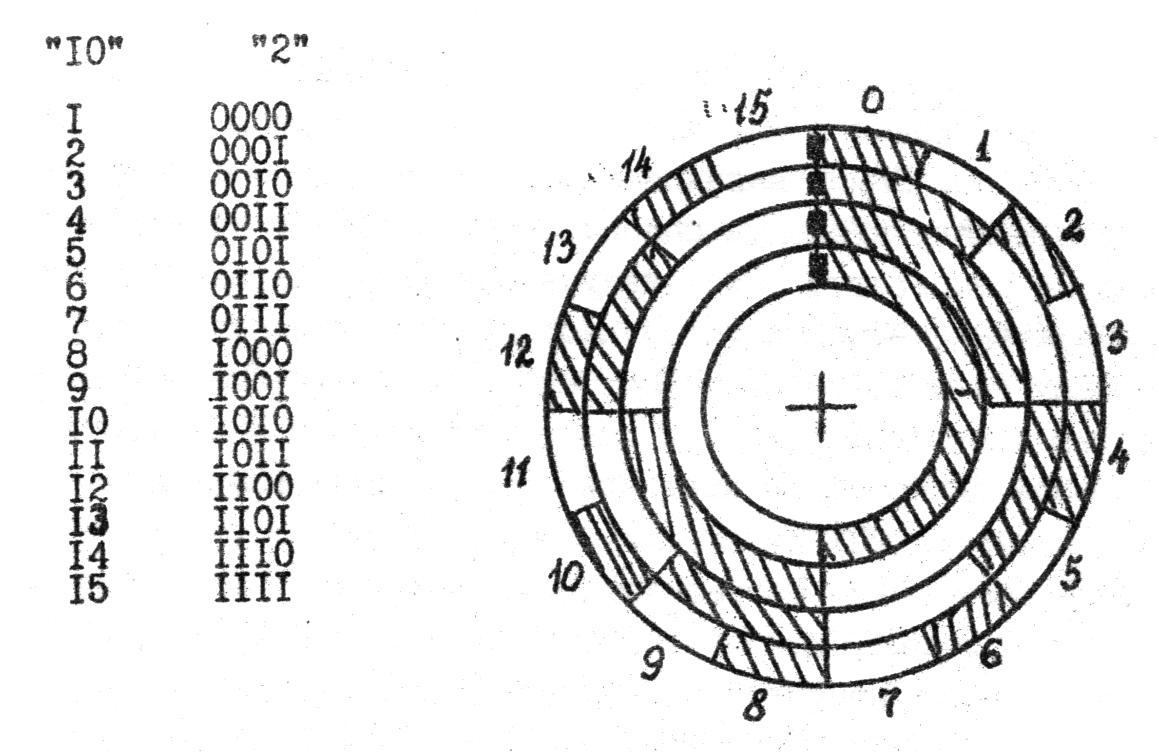
Нетрудно увидеть, что у такого преобразователя имеется существенный недостаток. Действительно, в двоичном позиционном коде два соседних тела, могут различаться значениями нескольких своих разрядов, Например, на границе 3 и 4, 7 и 8, 11 и 12 секторов светлые участки сменяется темными в 3 разрядах. Во избежание считывания ложных кодов при переходе от одного числа к другому необходимо, чтобы граница между секторами была прямой линией и считывающая маска располагалась точно по этой прямой.
Но практически это требование невыполнимо, так как кодовые шкалы изготавливаются с погрешностью, а считывающая матрица устанавливается в пределах некоторого допуска. Неодновременность считывания на границе секторов приводит к ошибкам неоднозначности, которые в худшем случае могут достичь половины максимального числа, считываемого с диска Для устранения этого недостатка часто используется кодовая маска Грея.
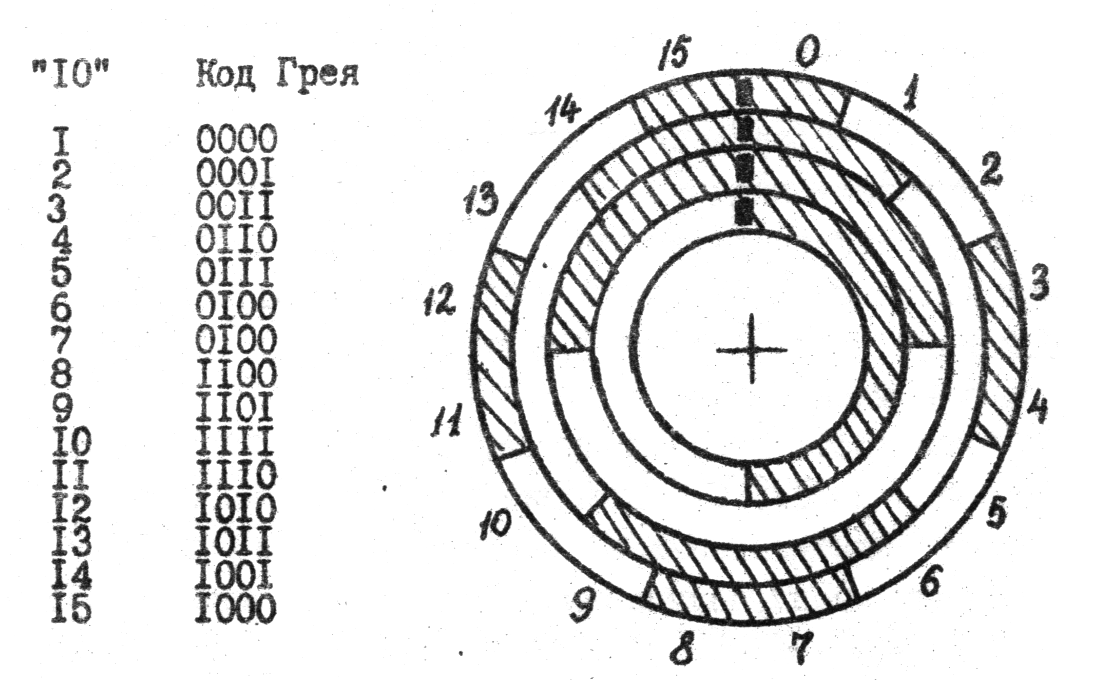
Циклический двоичный код Грея относится к числу однопереходных кодов, в которых переход от одного числа к соседнему сопровождается переменой кода только в одном разряде. На рис. 2 показана 4-разрядная кодовая маска Грея и последовательность изображений десятичных чисел в данном коде. Из рассмотрения кодовой маски видно, что при переходе от одного сектора к соседнему только а одном разряде приходится пересекать границу светлого и темного участков. Следовательно, ошибки неоднозначности в этом случае не будут превышать единицы младшего разряда. Из рис.2 также видно, что длина светлых и темных участков всех разрядов, кроме старшего, в 2 раза больше, чем при двоичном кодировании. Это позволяет получить в преобразователях с кодом Грея вдвое большую разрешающую способность, чем с обычным двоичным кодом.
Число
щелей подвижного растра N выражается
как
![]() где S = 2,…, n – номер разряда. Шаг
подвижного растра определяется
количеством его щелей
где S = 2,…, n – номер разряда. Шаг
подвижного растра определяется
количеством его щелей
![]() Для предотвращения ошибок считывания
угловая ширина щелей индексной
(неподвижной) диафрагмы не должка
превышать угловой ширины щелей младшего
разряда кодовой маски. Обычно выбирается
Для предотвращения ошибок считывания
угловая ширина щелей индексной
(неподвижной) диафрагмы не должка
превышать угловой ширины щелей младшего
разряда кодовой маски. Обычно выбирается
![]() .
.
Рис. 2. Кодовая маска Грея |
Для перевода кода Грея в двоичный позиционный код используются преобразователи кодов, построенные, например, на основе сумматоров по модулю 2. Число разрядов кодовой маски ПС ограничивается максимально возможным средним радиусом дорожки и минимально возможными размерами ее участков. Как правило, максимальное число разрядов ПС при внешнем диаметре кодового диска, меньшем 100 мм, составляет 13-14. Для увеличения точности ПС используют либо два отсчета – грубый и точный, либо три – грубый, промежуточный и точный.
3. Описание лабораторной установки
3.1. В состав лабораторной установки входят промышленный робот ТУР-10, панель индикации состояния датчика поворота и измеритель перемещения (механический или оптический).
Промышленный робот ТУР-10 состоит из манипулятора, устройства числового программного управления УПМ-772 и блока управления электроприводами (БУЭП). Панель индикации подключена к устройству управления УПМ-772 с помощью кабеля. Измеритель перемещения устанавливается на специальном столе в зоне действия охвата или непосредственно на схвате.
В лабораторной работе исследуется датчик угла поворота робота. Механизм поворота предназначен для поворота механической руки вокруг вертикальной оси на 340°. Он содержит неподвижное основание и поворотную платформу в виде стакана. Приводной двигатель с волновым редуктором установлен на основании внутри платформы. Датчик перемещения ППК-15 соединяется с выходным валом редуктора через безлюфтовую зубчатую передачу с отношением i - 15,6.
Выходной сигнал датчика в виде 15-разрядного параллельного кода поступает в УПМ-772 и одновременно выводится на панель индикации с помощью светодиодов.
3.2. Управление органами робота и задние программы осуществляются с пульта управления (рис.3), расположенного на передней стенке УПМ-772 и выносного пульта обучения (рис.4), соединенного с УПМ-772 кабелем.
Рис. 3. Пульт управления УПМ-772 |
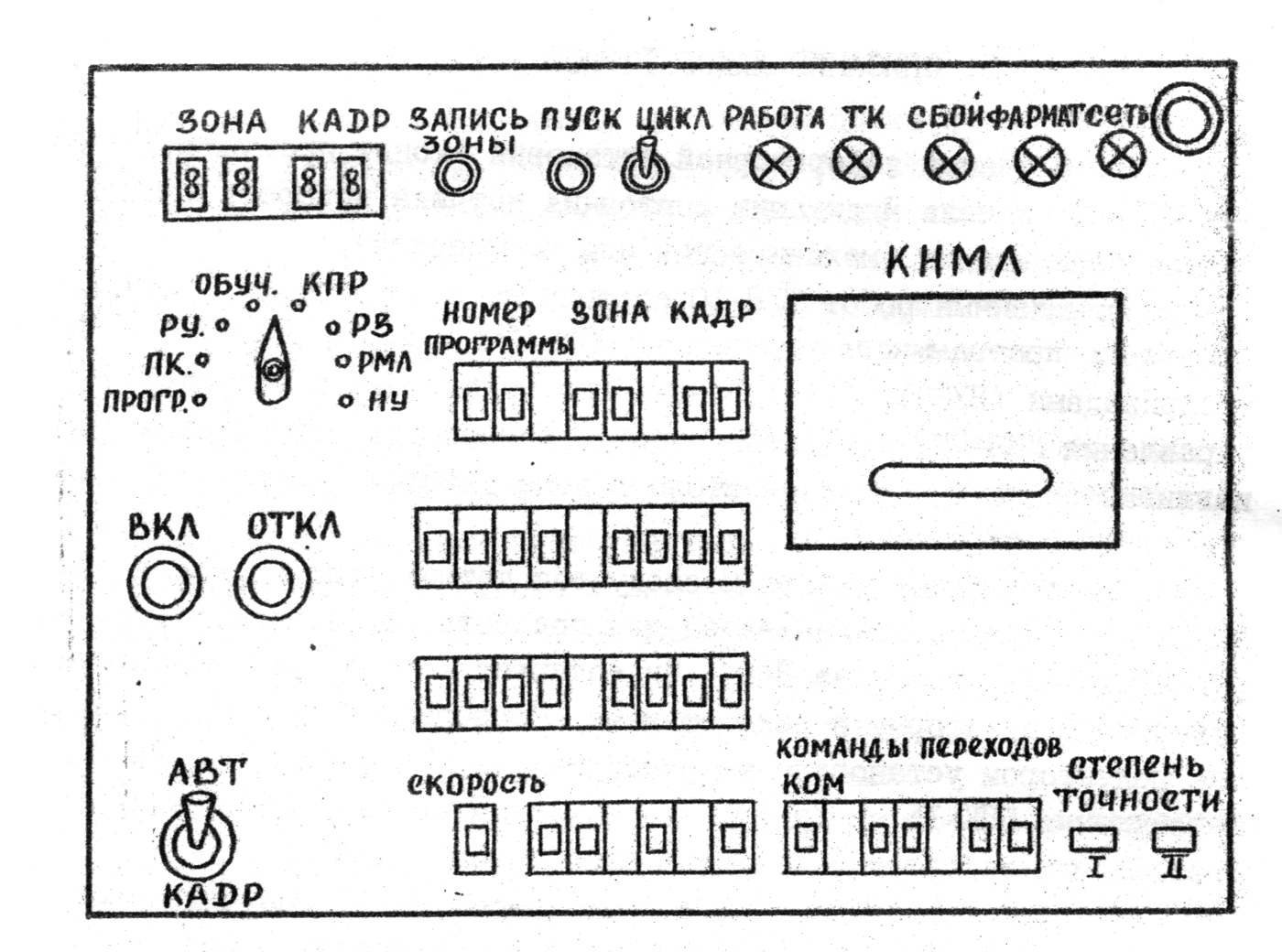
Поясним назначение органов управления роботом, которые используются для выполнения лабораторной работы.
Рис. 4. Пульт обучения УПМ-772 |

Круговой переключатель (на 8 положений) устанавливает один из 8 режимов работы устройства: НУ - нулевая установка; РЗ - разметка зоны; ОБУЧ - обучение; РУ - ручное управление; ПРОГР - программный режим.
Тумблер ЦИКЛ обеспечивает задание однократной или циклической отработки программы.
Тумблер АВТ/КАДР обеспечивает задание автоматической отработки программы или одного кадра.
Кнопка ПУСК осуществляет начало работы (пуск программы) во всех режимах.
Кнопки ВКЛ и ОТКЛ предназначены для включения и отключения напряжения питания.
Кнопка аварийного стопа (красная) предназначена для аварийного останова манипулятора,
В режиме "обучения" для составления программы применяется переключатели:
КОМ - для создания команд переходов;
СКОРОСТЬ - для задания скорости перемещения;
СТЕПЕНЬ ТОЧНОСТИ - для задания точности позиционирования.
Цифровые индикаторы ЗОНА и КАДР отображают соответственно информацию о номерах зоны и кадра программы.
Индикаторные лампы РАБОТА, СБОЙ и СЕТЬ отображают информацию о нормальней работе, сбойных ситуациях и включении напряжения питания соответственно.
На пульте обучения находятся: кнопки ЗАПИСЬ КАДРА - для записи в ячейку памяти положения манипулятора и положений переключателей пульта; регулятор СКОРОСТЬ - для установки скорости движения при обучении; кнопки (+) и (–) - для задания перемещения органов манипулятора; кнопка аварийного выключения. Нумерация кнопок (+) и (-) соответствует следующим перемещениям: I - поворот робота; II - поворот вертикального звена; III - поворот горизонтального звена; IV - качание кисти; V - ротация кисти.
3.3. Подготовка робота к работе
Установить все программные переключатели в нулевое положение, тумблер ЦИКЛ выключить, тумблер АВТ/КАДР установить в положение КАДР.
Включить автомат, расположенный на передней панели БУЭП.
Включить питание стойки (кнопка ВКД), проверить по индикатору СЕТЬ наличие напряжения питания.
Установить режим НУ, нажать кнопку ПУСК,
Установить режим РЗ, нажать кнопку ПУСК.
Установить режим НУ, нажать кнопку ПУСК.
ВНИМАНИЕ! При загорании лампы СБОЙ следует повторить предыдущую команду.
3.4. Обучение робота
ВНИМАНИЕ! Во избежание поломок органов манипулятора, при любой аварийной ситуации, следует быстро нажать кнопку аварийного выключения (красная кнопка в правом верхнем углу пульта). Особую опасность представляет возникновение самопроизвольного (не заданного программой) движения робота.
Включить БУШ (нажать черную кнопку на передней панели БУЭП).
Установить команду безусловного перехода к нулевому кадру (переключатель КОМ, код 3).
3.4.3. Переключателем СКОРОСТЬ установить требуемую скорость перемещения (код 0 соответствует минимальной скорости, код 8 -максимальной).
3.4.4. Кнопками СТЕПЕНЬ ТОЧНОСТИ установить требуемую точность позиционирования (точное позиционирование - кнопки I и II отжаты, средняя точность - нажата кнопка I, грубое позиционирование - нажата кнопка II).
3.4.5. Установить режим ОБУЧ, нажать кнопку ПУСК.
3.4.6. С помощью кнопок (+) и (–) пульта обучения установить руку робота в удобное для исследования точности позиционирования Положение (отработка команды поворота). При этом скорость перемещения органов манипулятора должна быть минимальной (ручка СКОРОСТЬ пульта обучения).
Установить измеритель перемещения в нулевое положение.
Записать в память координаты манипулятора и режимы работа (кнопка ЗАПИСЬ КАДРА), нажать кнопку ПУСК, проконтролировать появление на индикаторе КАДР цифры I.
Не изменяя положения манипулятора, еще раз нажать кнопку ЗАПИСЬ КАДРА и кнопку ПУСК, проконтролировать появление на индикаторе КАДР цифры 2.
3.4.10. Установить режим НУ, нажать кнопку ПУСК,
3.5. Порядок работы при исследовании характеристик
Установить режим РУ, нажать кнопку ПУСК.
С помощью кнопок I (пульта обучения) повернуть робот от исходной точки вправо или влево на любой случайно выбранный угол.
3.5.3. Установить режим ПРОГР, нажать кнопку ПУСК. При этом робот должен вернуться в исходное положение. Снять показания датчика положения и измерителя перемещения.
Для повторения опыта необходимо последовательно выполнить п.п. 3.5.1, 3,5.2, 3.5.3.
Чтобы изменить точность позиционирования и скорость перемещения, следует повторить п.п. 3.4.3 - 3.4.10.