Материал: Конспект до лекції 2
Дослідження показали, що точність визначення кутів л,п , п є кращою, аніж для кутів κл, п; для лінійно-кутової системи елементи , , визначаються краще, ніж кути , .
Задача взаємного орієнтування розв’язується погано або зовсім не розв’язується, якщо сфотографована поверхня близька до поверхні циліндра, твірна якого паралельна до базису фотографування. Це так звана “умова невизначеності взаємного орієнтування”. Тоді детермінант матриці нормальних рівнянь є або нулем, або близький до нуля.
Професор І. Антіпов довів, що цього негативного явища можна позбутись, якщо до рівнянь взаємного орієнтування додається умова рівності координат зв’язкових точок.
2.2. Сумісне визначення елементів взаємного орієнтування та передавання масштабу для двох суміжних моделей
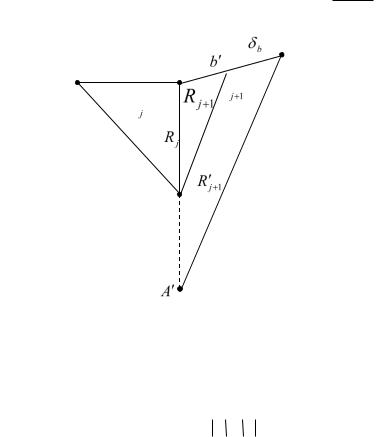
Нехай визначені елементи взаємного орієнтування j-ї моделі за формулою (2.11) та розв’язана пряма фотограмметрична засічка, тобто в j-й моделі визначено координати точки А (початок координат у точці S2). Необхідно одночасно знайти елементи взаємного орієнтування (j+1)-ї моделі та виконати приведення масштабу (j+1)-ї моделі до масштабу попередньої j-ї моделі (рис. 2.2). Як відомо, визначення елементів взаємного орієнтування виконується на підставі виміряних поперечних паралаксів, а передавання масштабу виконується за зв’язковими точками. Математичне формулювання задачі полягає у використанні рівняння (2.12) взаємного орієнтування та рівності векторів
тобто
R j
S1 S2
|
|
|
, |
|
|
|
|
|
S2 A = S2 A |
|
|
|
|
|
|||
= R |
|
= R |
K = |
R |
b − b |
= R |
− R |
b |
j+1 |
|
|
||||||
|
j+1 |
|
j+1 |
b |
j+1 |
j+1 |
b |
|
|
|
|
|
|
|
|
||
|
|
|
S3 |
|
|
|
|
|
.
(2.28)
A
Рис. 2.2. З’єднання двох моделей за зв’язковими точками
Строго кажучи, рівняння (2.28) є нелінійним відносно шуканих елементів, , , , , b і тому треба було б застосувати описаний вище прийом лінеаризації
(розклад функції у ряд Тейлора). |
|
|
|
|
|
|
||
З практичного погляду, враховуючи, що |
R Z |
та те, що розв’язання задачі відбувається |
||||||
ітеративно, перепишемо (2.28) так: |
|
|
|
|
|
|
||
|
Z |
b + Z |
|
− Z |
= v |
, |
|
(2.29) |
|
|
j |
|
|||||
|
b |
j+1 |
b |
|
|
|
||
|
|
|
|
|
|
|
||
або |
|
|
|
|
ab b + lb = vb . |
(2.30) |
||

Отже, для всіх точок (j+1)-ї стереопари складається система рівнянь (2.12), до неї долучаються рівняння (2.30), записані для зв’язкових точок, і одночасно розв’язується система нормальних рівнянь з 6 невідомими
|
|
|
|
|
|
|
X = |
|
|
|
|
b T |
(2.31) |
Уразі застосування МНК послідовність розв’язання така:
1.Для кожної зв’язкової точки розв’язують пряму фотограмметричну засічку у j-й моделі.
2.Задаються наближеними значеннями елементів взаємного орієнтування та базису в (j+1)-
й моделі
|
0 |
, |
|
0 |
, |
|
0 |
, |
|
0 |
, |
|
0 |
, |
|
|
|
|
|
b |
0 |
|
.
3.Для кожної пари виміряних точок обчислюють коефіцієнти та вільні члени (2.6).
4.Для кожної зв’язкової точки розв’язують пряму фотограмметричну засічку у (j+1)-й моделі, використовуючи спочатку наближені (а потім уточнені) параметри (елементи взаємного орієнтування та базис).
5.Для кожної зв’язкової точки складають рівняння (2.30).
6.Складають нормальні рівняння, отримують розв’язок (2.31).
7.Обчислюють уточнені значення невідомих
= |
0 |
+ |
( ) |
(i) |
, |
|||
|
|
|
||||||
= |
0 |
+ ( ) |
(i) |
, |
||||
|
|
|
||||||
= |
0 |
+ ( |
||||||
|
||||||||
|
= |
|
|
|
|
) |
(i) |
, |
|
||
0+ ( )(i) ,
=0 + ( )(i) ,
b = b |
0 |
+ ( b) |
(i) |
. |
|
|
(2.32)
8. Перевірка ітераційного процесу на перевірка
b |
(i) |
|
збіжність
− b |
(i+1) |
|
|
аналогічна до (2.10), тільки додається
b .
9. Оцінка точності розв’язання задачі аналогічна до (2.11), тільки в знаменнику стоятиме величина (n–6).
Зазначимо, що геометричну сутність рівнянь (2.28) вперше використав проф. А. Скірідов, назвавши їх “умовою бокових сторін”. Він також запропонував використати цю умову для уточнення кутового орієнтування моделі на універсальних стереоприладах.
Як вже зазначалось, проф. І. Антіпов застосував цю саму умову у побудові мережі маршрутної фототріангуляції методом залежних моделей. Таке одночасне розв’язання задачі визначення елементів взаємного орієнтування та передавання масштабу принципово змінило проблему “невизначеності елементів взаємного орієнтування”. Оскільки детермінант сукупної системи нормальних рівнянь відрізняється від нуля, то розв’язок задачі є завжди стабільним.
2.3. Задача абсолютного орієнтування моделі
У результаті розв’язання прямої фотограмметричної засічки, описаного в п. 4.1, отримують просторові координати точки А моделі об’єкта . Якщо система SXYZ є абсолютною (геодезичною), і кути нахилу знімків та базису визначені в цій системі, то зрозуміло, що модель будується в абсолютній системі координат.
Проте найчастіше система SXYZ є відносною, і тому треба знайти елементи геодезичного орієнтування моделі:
U = X 0 |
|
Y0 |
|
Z 0 |
|
|
0 |
0 |
t |
T |
. |
(2.33) |
Ф |
Ф |
0 |
|
|||||||||
|
|
|
Ф |
|
|
|
|
|
|
|
З геометричного погляду ця задача складається з трьох дій:
–перенесення початку координат з центра OФ у центр O;
–“поворот простору”;
–зміна масштабу моделі, тобто приведення його до величини t.
Формули перетворення координат є такими:

|
|
|
|
|
|
|
|
|
|
|
X |
Г |
|
|
|
|
|
X |
0 |
Ф |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
YГ |
|
= |
|
|
|
|
Y0 |
Ф |
|
|
|
+ А |
0 |
, |
|
, |
0 |
|
Y |
|
|
t . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Z |
|
Г |
|
|
|
|
|
Z |
0Ф |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Оскільки функції (2.34) є нелінійними відносно вектора (2.33), то приведемо |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
лінійного вигляду: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
a |
X |
0 |
+ b |
Y |
+ c |
x |
Z |
|
0 |
|
+ d |
x |
|
0 |
|
+ e |
|
0 |
|
+ f |
x |
|
0 |
+ g |
x |
t + l |
x |
= v |
x |
, |
||||||||||||||||||||||||||||||||||||||
|
|
|
x |
|
|
x |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
a |
X |
0 |
+ b |
Y |
+ c |
Z |
0 |
+ d |
y |
|
0 |
|
+ e |
|
0 |
|
+ f |
y |
|
0 |
+ g |
y |
t + l |
y |
= v |
y |
, |
|||||||||||||||||||||||||||||||||||||||||
|
|
|
y |
|
|
y |
|
|
0 |
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
a |
X |
0 |
+ b |
z |
Y |
+ c |
Z |
0 |
|
+ d |
z |
|
0 |
|
+ e |
|
0 |
|
+ f |
z |
|
0 |
+ g |
z |
t + l |
z |
= v |
z |
. |
|||||||||||||||||||||||||||||||||||||||
|
|
|
z |
|
|
|
|
0 |
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Тут: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
x |
|
|
=1, |
|
|
|
|
|
|
b |
|
|
= 0, |
|
|
|
|
c |
x |
= 0, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
y |
|
|
= 0, |
|
|
|
|
|
|
|
b |
y |
=1, |
|
|
|
|
c |
y |
= 0, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
z |
|
= 0, |
|
|
|
|
|
|
b |
|
|
= 0, |
|
|
|
|
c |
z |
=1, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
d |
x |
|
= − Z , |
|
|
e |
x |
= − Y sin |
0 |
, |
|
|
|
|
|
|
|
f |
x |
|
= (a X − a Y )t, |
|
|
g |
x |
= X , |
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
d |
|
|
= 0, |
|
e |
|
= − Ytg |
|
|
− |
|
|
|
|
1 |
|
|
Z t, |
|
|
|
|
f |
|
|
= (b X − b Y )t, |
|
|
|
|
g |
|
= Y , |
|||||||||||||||||||||||||||||||||||||
y |
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
y |
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
cos |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
z |
|
= X , |
|
|
e |
z |
= Y cos |
0 |
, |
|
|
|
|
|
|
|
f |
z |
= (c |
|
X − c Y )t, |
|
|
|
|
g |
z |
= Z , |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
X = (a X + a |
Y + a Z )t, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
x |
|
= X |
0 |
+ X − X |
Г |
, |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
2 |
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
Y = (b |
X + b Y + b Z )t, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
y |
|
= Y |
|
|
+ Y −Y |
, |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
1 |
|
|
|
|
2 |
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
|
|
|
0 |
|
|
|
|
|
|
|
Г |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
Z = (c X + c Y + c |
|
Z )t, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= Z |
|
|
+ Z − Z . |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
1 |
|
|
|
|
2 |
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
Г |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
(2.34)
їх до
(2.35)
У рівняння (2.35) входять сім невідомих. Для однозначного розв’язання задачі треба мати дві планово-висотні опорні точки (вони дають шість рівнянь) та одну висотну (дає одне рівняння). Тоді задача розв’яжеться без контролю.
Найчастіше беруть чотири планово-висотні точки, розташовані по кутах стереопари, і розв’язують задачу, використовуючи МНК.
Знаходження вектора (2.33) є ітераційним і принципово не відрізняється від описаного у п.2.1.1.
Метод придатний до застосування за будь-яких значень елементів геодезичного (абсолютного) орієнтування моделі.