Материал: Конспект до лекції 2
Тема 2. Аналітичне розв’язання задач орієнтування моделі
Тематичний план
2.1.Задача аналітичного взаємного орієнтування пари знімків.
2.2.Сумісне визначення елементів взаємного орієнтування та передача масштабу для двох суміжних моделей.
2.3.Задача абсолютного орієнтування моделі
2.1. Задача аналітичного взаємного орієнтування пари знімків.
2.1.1. Строгий спосіб
Задача полягає у знаходженні елементів взаємного орієнтування у вибраній системі - лінійно-кутовій чи базисній. Для обох систем порядок розв’язання задачі однаковий, а різниця полягає лише в тому, що в лінійно-кутовій системі використовується рівняння (1.13), а в базисній рівняння (1.17).
Ці рівняння отримані нами раніше. Подамо розв’язок для обох систем.
Для базисної системи необхідно знайти елементи взаємного орієнтування л , п , л , п , п . Рівняння взаємного орієнтування
F =Y Z |
−Y Z |
= 0 |
||
1 |
2 |
2 |
1 |
|
є нелінійним стосовно визначуваних елементів взаємного орієнтування. лінеаризації шляхом розкладання функції (2.1) в ряд Тейлора:
(2.1)
Використаємо прийом
F = F |
+ |
F |
d |
|
+ |
F |
d |
|
+ |
F |
d |
|
+ |
F |
d |
|
+ |
F |
d |
|
= 0 |
|||||
|
|
л |
|
|
л |
|
|
п |
|
|
п |
|
|
п |
||||||||||||
o |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
л |
|
|
|
л |
|
|
|
п |
|
|
|
п |
|
|
|
п |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
(2.2)
Вводячи позначення для частинних похідних
a = |
F |
, |
b = |
F |
, |
c = |
F |
|||
|
|
|
|
|
|
|||||
|
л |
|
|
л |
|
|
п |
|||
|
|
|
|
|
|
|
|
|||
,
d = |
F |
|
|
||
|
||
|
п |
,
e = |
F |
|
|
||
|
||
|
п |
,
(2.3)
для початкового значення функції Fo = l , приймаючи до уваги, що вимірювання на помилками, запишемо (2.2) у вигляді рівняння
(2.4)
знімках супроводжується випадковими поправок:
a л + b л + c п + d п + e п + l = v . |
(2.5) |
Конкретні математичні вирази для частинних похідних a, b, c, d, e |
та вільного члена l |
отримують диференціюванням (2.1) з врахуванням залежностей визначення координат точок
|
|
до системи координат знімка) та виразів для напрямних |
об’єкта (переходу від системи SX Y Z |
|
косинусів. Подамо ці формули в кінцевому вигляді:
a = −X |
Y , |
|
|
b = Z B − Y C, |
|
|
|
c = Y X |
, |
|
|
||||||||||||
|
1 |
2 |
|
|
|
|
2 |
|
|
|
|
2 |
|
|
|
|
|
|
1 |
2 |
|
|
|
d = Y E − Z |
F , |
e = Y |
C − Z |
B |
|
|
|
|
|
||||||||||||||
1 |
|
1 |
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|||
E = Y cos |
п |
, |
|
|
C = c |
2 |
x |
1 |
− c |
y |
|
, |
B = b x |
1 |
|||||||||
2 |
|
|
|
|
|
|
|
|
|
|
1 |
|
1 |
|
|
|
2 |
||||||
|
|
|
|
|
|
|
C = c x |
2 |
− c y |
2 |
, |
B = b x |
2 |
||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
1 |
|
|
|
|
|
2 |
|
|||||
F = x b sin |
п |
− y b cos |
п |
+ |
f |
|
cos |
п |
, |
|
|
|
|||||||||||
2 |
|
3 |
|
|
|
2 3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
l = Y1 Z2 − Z1Y2 .
Тут індекс 1 стосується лівого знімка, індекс 2 – правого знімка; b1, b2, c1, c2 – напрямні косинуси для лівого знімка,
b1 , b2 , b3 , c1 , c2 - напрямні косинуси для правого знімка.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− b y |
|
|
, |
|
|
1 |
|
||||
1 |
|
||||
− b y |
|
|
|
||
|
|
, |
|||
1 |
|
2 |
|
||
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
(2.6)

Якщо вибираємо лінійно-кутову систему , то маємо рівняння (2.7):
F = (Y Z |
− Y Z ) − tg |
( X |
Z |
− X Z |
) + |
tg |
( X Y − X Y ) = 0 |
|
|
|
||||||||
|
|
|
|
|||||||||||||||
1 |
2 |
2 |
1 |
|
1 |
2 |
2 |
1 |
|
cos |
1 |
2 |
2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Подальші дії аналогічні, як і для базисної системи. |
|
|
|
|
||||||||||||||
Опускаючи проміжні викладки, запишемо рівняння поправок: |
|
|
||||||||||||||||
|
|
|
|
a + b + c + d + e + l = v . |
||||||||||||||
Тут частинні похідні |
a, b, c, d, e мають вигляд: |
|
|
|
|
|
|
|||||||||||
|
|
|
a = −(x Z |
+ fX ) sec |
2 |
− (x Y − y |
X )tg sin |
/ cos |
2 |
, |
||||||||
|
|
|
|
|
||||||||||||||
|
|
|
1 |
2 |
|
|
2 |
|
|
|
1 |
2 |
1 |
2 |
|
|
|
|
b= (x1Y2 − y1 X 2 ) sec 2 / cos ,
c= ( y1 − x1tg )X 2 + ( ftg + y1tg /cos )Z2 ,
d = −( ftg + y |
tg |
/ cos )[a |
3 |
(x |
2 |
sin + y |
2 |
cos ) − f sin sin ] + |
|||||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
+ ( f |
+ x tg /cos )[b |
(x |
2 |
sin + y |
2 |
cos ) + f cos ] + |
|||||||||||
|
1 |
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|||
+ ( y |
− x tg )[c |
3 |
(x |
2 |
sin + y |
2 |
cos ) + f |
cos sin ], |
|||||||||
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
e = ( ftg + y |
tg /cos )(a |
1 |
y |
2 |
− a |
2 |
x |
2 |
) − ( f |
+ x |
tg / cos )(b y |
2 |
− b x |
2 |
) − |
|||||||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
2 |
|
|||||||
− ( y |
1 |
− x |
tg )(c |
1 |
y |
2 |
− c |
2 |
x |
2 |
). |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
(2.7)
(2.8)
(2.9)
Вільний член l обчислюється за формулою (2.6).
Тут індекс 1 стосується лівого знімка, індекс 2 – правого знімка. Напрямні косинуси а1, а2, b1,
b2, c1, c2 стосуються правого знімка. |
|
|
|
|
|
|
Повернемось до геометричного змісту задачі |
(рис.1.3). . Що означає |
порушення взаємного |
||||
орієнтування (положення) базису B та знімків? |
|
|
|
|
|
|
Очевидно, це викличе те, що промені R1 і R2 |
не перетнуться в точці |
A . Якщо спостерігати |
||||
|
|
|
|
|
||
стереоскопічно модель, побудовану зі стереопари P − P , то це означатиме, що в точці A |
||||||
|
1 |
2 |
|
|
||
матимемо поперечний паралакс. Отже, поперечний паралакс – це |
наслідок порушення |
|||||
взаємного орієнтування, а значить, вимірявши його в декількох точках стереопари, можемо знайти елементи взаємного орієнтування. Так як кожен вимір точки моделі дає одне рівняння точки, а невідомих маємо п’ять, то значить, що на стереопарі необхідно провести виміри щонайменше в п’яти точках. При використанні аналітичного способу число точок n , як правило, значно більше, і це дозволяє точніше визначити елементи взаємного орієнтування. При n>5 застосовують метод найменших квадратів (МНК).
Послідовність розв’язання задачі (для обох систем взаємного орієнтування) така:
1. Задаються наближеними значеннями елементів взаємного орієнтування
|
o |
, |
o |
, |
o |
, |
o |
, |
o |
( |
o |
, |
o |
, |
o |
, |
o |
, |
o |
л |
л |
п |
п |
п |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
)
.
2.Для кожної виміряної точки стереомоделі (тобто для ідентичних точок на лівому і правому знімках) обчислюють коефіцієнти та вільний член рівнянь поправок за
формулами (2.6) або (2.9) і умови r = k R .
В результаті цих дій формується матриця коефіцієнтів
a1a A = 2
n,5 ...
an
та матриця-стовпчик вільних членів
b1 |
c1 |
d1 |
e1 |
|
||||
b |
|
c |
|
d |
|
e |
|
|
|
2 |
|
1 |
|
2 |
|
2 |
|
... ... ... |
... |
|||||||
bn |
cn |
d n |
|
|
|
|||
en |
||||||||
L = [l1l2 ...ln ]T
n,1
(2.10)
( 2.11)

3. З усіх рівнянь поправок (2.5) чи (2.8), враховуючи матричний запис (2.10) і (2.11) отримуємо систему рівнянь поправок
A X + L n,5 5,1 n,1
= V n,1
,
(2.12)
де X - матрицястовпчик шуканих поправок до наближених значень елементів взаємного орієнтування
або
X = [ |
л |
x |
л |
|
п |
|
п |
5,1 |
|
|
|
||||
|
|
|
|
|
|
|
|
X = [ |
|
|
|
|
|
|
|
5,1 |
|
|
|
|
|
|
|
x
п ]
]
T
T
.
,
(2.13)
(2.13’)
Накладаючи умову мінімізації поправок |
|
|
|
|
V |
T |
V |
= min , |
|
|
|
|
|
|
|||||
отримаємо систему нормальних рівнянь |
|
|
|
|
|
|
|
|
|
|
AA |
T |
|
|
|
T |
|||
|
|
X + A L = 0 |
|||||||
та розв’язок |
X = −( A |
T |
A ) |
−1 |
A |
T |
L |
|
|
|
|
|
|
||||||
4. Обчислюють уточнені значення шуканих невідомих
(2.14)
(2.15)
(2.16)
= o
лл
л = лo
= o
пп
= o
пп
= o
пп
+ л , |
|
+ л , |
(2.17) |
|
|
+ п , |
|
+ п , |
|
+ п . |
|
Для елементів в лінійно-кутовій системі обчислення аналогічні.
5. Оскільки ми використовували прийом ліанеризації нелінійних функцій, то для досягнення точного результату застосовуємо метод послідовних наближень (ітераційний процес).
Тому перевіряємо ітераційний процес на збіжність:
|
|
i |
i+1 |
, |
|
|
|
л − л |
|
||
|
|
л |
− л |
, |
|
|
|
i |
i+1 |
|
|
|
|
i |
i+1 |
, |
(2.18) |
|
|
п |
− п |
||
|
|
пi |
− пi+1 |
, |
|
|
|
п |
− п |
. |
|
|
|
i |
i+1 |
|
|
Тут i |
- номер ітерації, |
- наперед задані допуски. |
|
||
При виконанні всіх умов (2.18) ітераційний процес завершено і переходять до пункту 6. Якщо хоча б одна з умов (2.18) не задовільняється, то повертаємось до пункту 2.
6. Після завершення ітераційного процесу проводять оцінку точності класичним для МНК способом. Спочатку обчислюють середню квадратичну помилку одиниці ваги
|
2 |
|
n
=v2 /(n − 5)
1
,
(2.19)
де поправка vi обчислюється з рівняння (2.8) або (2.5), підставляючи замість невідомих їх розв’язок з останньої ітерації. Геометричний зміст величини vi - це залишковий поперечний
паралакс після знаходження елементів взаємного орієнтування.
Середні квадратичні помилки елементів взаємного орієнтування використовуючи діагональні елементи оберненої матриці нормальних рівнянь входять в (2.16):
знаходять,
( A |
T |
A) |
−1 |
, що |
|
|
Для елементів
, , , ,
m |
л |
= |
Q11 |
, |
|
|
|
|
|
m |
л |
= |
Q22 |
, |
|
|
|
|
|
m |
п |
= |
Q33 |
, |
|
|
|
|
|
m |
п |
= |
Q44 |
, |
|
|
|
|
|
m |
п |
= |
Q55 . |
|
|
|
|
|
|
- формули аналогічні до (2.20).
(2.20)
2.1.2.Наближений спосіб
Придатний для опрацювання пари планових аерознімків (кути нахилу не перевищують
3o ).
В цьому випадку в порівнянні зі строгим способом проводять певні спрощення, які базуються на тому, що при малих кутах sin , cos 1, sin sin 2 = 0 (величина мала другого порядку в порівнянні з ). Тому рівняння (2.5) - базисна система - матиме вигляд:
x |
|
y |
|
|
|
|
|
|
|
|
x |
|
y |
|
|
|
|
|
y |
2 |
|
|
|
|
|
|
|
л |
л |
|
|
+ x |
|
|
|
− |
п |
п |
|
|
− ( f |
+ |
п |
) |
|
− x |
|
|
|
+ q = 0 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
f |
|
л |
л |
л |
|
|
f |
|
п |
f |
п |
п |
п |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Рівняння (2.8) для лінійно-кутової системи є таким:
|
x |
|
y |
|
|
x |
|
y |
|
|
y |
2 |
|
|
− xл − |
л |
л |
− |
п |
п |
− ( f + |
п |
) − xп п + q = 0 . |
||||||
|
|
|
|
|
||||||||||
|
|
f |
|
|
|
f |
|
f |
||||||
|
|
|
|
|
|
|
|
|
|
|||||
. (2.21)
(2.22)
Тут x л , y л , xп , yп - координати точки на лівому і правому знімках,
q
- поперечний
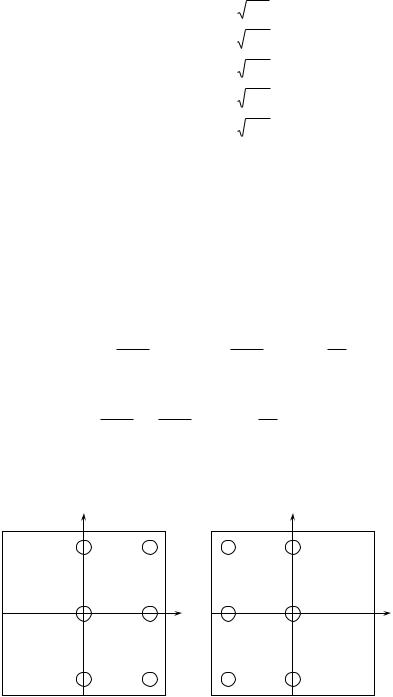
паралакс. Щоб спростити розв’язок, точки для вимірювання вибирають не довільно, а в т.зв. стандартних зонах стереопари (рис.1.3).
yл
yп
3 |
4 |
|
3 |
4 |
|
|
+ y |
|
|
+ y |
|
|
b |
|
−b |
|
|
1 |
2 |
хл |
1 |
2 |
хп |
|
|
||||
|
− y |
|
|
− y |
|
|
|
|
|
|
|
5 |
6 |
|
5 |
6 |
|
Рис.2.1 Стандартні зони для визначення елементів взаємного орієнтування.
Кількість точок для вимірів рівна шести, тобто маємо один надлишковий вимір, що дозволяє виконати контроль розв’язання задачі (заради об’єктивності зазначимо, що цей контроль досить слабкий). З рис.2.1 можемо записати координати точок:
точка 1: точка 2: точка 3: точка 4: точка 5: точка 6:
x |
л |
= y |
л |
|
|
xл = b , xл = 0, xл = b, xл = 0, xл = b,
= 0,
x |
п |
= −b, |
|
|
y |
л |
= 0, |
|
|
yл = yп = y , yл = yп = y , yл = yп = −y , yл = yп = −y ,
xп
xп xп xп xп
yп
= y |
п |
= |
|
|
= −b ; = 0 ; = −b ; = 0 .
= 0 ;
0 |
; |
(2.23)
Тут
b
- базис знімка,
y
- стандартна ордината зони (наприклад, 70мм). При таких значеннях
координат шести точок рівняння (2.21) можна розв’язати аналітично і отримати наступні формули для безпосереднього обчислення елементів взаємного орієнтування в базисній системі:
п
=
л = 2byf (q6 − q4
f |
|
(q3 |
+ q5 − 2q1 ) , |
||||||
2 y |
2 |
||||||||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
п |
= |
||
|
|
|
|
|
|
|
|
||
л |
= |
f |
п − |
q2 |
, |
|
|
||
b |
b |
|
|
||||||
|
|
|
|
|
|
|
|||
) , |
|
= |
|
|
п |
1 |
( |
|
|
2 |
п |
|
|
п = 2byf (q5
f |
|
(q |
|
+ q |
|
|
|
2 |
4 |
6 |
|||
2 y |
|
|
|
|||
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ п ) , |
|
|
|
|||
|
|
п = |
f |
|||
|
|
b |
||||
|
|
|
|
|
||
− q3 ) ,
− 2q2 ) ,
п − qb1 .
(2.24)
Для елементів взаємного орієнтування в лінійно-кутовій системі з рівнянь (2.22) отримаємо аналітичний розв’язок:
= |
f |
(q |
|
||
|
2by |
4 |
|
|
+ q5
= − |
f |
|
|
+ |
q2 |
, |
|
b |
|
|
|
b |
|||
|
|
|
|
|
|
||
− q3 − q6 ) |
, |
|
|
|
|
||
|
|
|
|
= |
1 |
(q |
|
|
|
|
|
|
|||
|
|
|
|
|
|
b |
2 |
|
|
|
|
|
|
|
|
= −
= |
|
f |
|
(q4 − q6 ) , |
|
||||||
|
|
|
|
||||||||
|
|
|
2by |
|
|
|
|
|
|||
f |
|
(q |
|
+ q |
|
+ q |
|
+ q |
|
||
|
2 |
3 |
4 |
5 |
6 |
||||||
4 y |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
q1 ) . |
|
|
|
|
|
|
|
|
|
|
|
− 2q1
−
2q |
2 |
) |
|
|
,
(2.25)
Точність визначення елементів взаємного орієнтування можна підрахувати з формул (2.26),
які отримують шляхом диференціювання виразів (2.24) або (2.25), вважаючи, що поперечні паралакси виміряні із середньою квадратичною помилкою mq :
m |
|
= m |
|
= |
f |
|
mq , |
|
|
|
|
m |
|
= |
f |
|
mq |
3 |
, |
||
л |
п |
b y |
2 |
|
|
|
|
п |
2 y |
2 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
mq |
|
3 f |
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
= m |
|
= |
1 + |
|
. |
|
|
|
|
|
|
|||
|
|
|
|
|
л |
п |
b |
4 y |
2 |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
або для лінійно-кутової системи:
m = |
f |
|
mq , |
|
m = |
|
f |
|
mq |
3 |
, |
|
||
b |
|
|
|
|
2 |
|
||||||||
|
|
|
y |
|
|
2 y |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
f |
|
|
|
|
|
|
|
1 |
|
|
|
3 f |
4 |
m = |
mq |
2 |
, |
|
m = |
mq |
1 + |
|
||||||
b |
|
b |
4 y |
2 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m = |
f |
mq . |
|
|
|
|
|
|
|
|
|
|
|
|
b y |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
,
(2.26)
(2.27)
Аналіз цих формул показує, що точність визначення елементів взаємного орієнтування залежить від величини фокусної віддалі знімків - для короткофокусних аерокамер точність є кращою, аніж для довгофокусних. Чим більше перекриття між знімками, тим менший базис, і точність є гіршою.
Окрім цих геометричних параметрів на точність розв’язання задачі істотно впливає похибка виміру поперечного паралаксу. Якщо кілька десятиліть тому на виробництві опрацьовували знімки, для яких mq 0.02мм , то зараз маємо значно кращі за геометричними
та спектральними характеристиками знімки, так що mq 0.002 − 0.005мм . Це означає, що
точність визначення елементів взаємного орієнтування зросла на порядок.