Материал: Классификация беспилотных летательных аппаратов
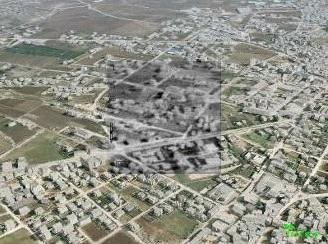
Разведка удаленных целей
Для
ведения разведки удаленных целей, БЛА «Дозор» могут применяться автономно,
аналогично применению на предельной оперативной дальности (Рисунок 8).
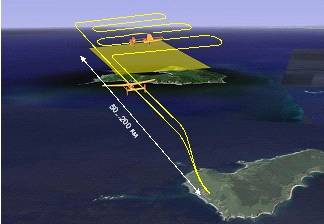
Работая вне зоны радиовидимости своего НПУ, аппаратура БЛА регистрирует всю информацию целевой аппаратуры в бортовых накопителях. Анализ данных производится после возвращения на базу. В другом варианте информация в реальном времени передается на корабль, находящийся в зоне прямой радиовидимости с БЛА. Таким образом, обнаружение цели и идентификация производится с помощью бортовых оптико-электронных систем наблюдения.
Применение
БЛА совместно с дистанционно управляемым катером
Нами прорабатывался вопросы взаимодействия морских и воздушных дистанционных средств для ведения разведки над акваторией морей.
Предлагается
следующий алгоритм комплексного применения средств (Рисунок 9):
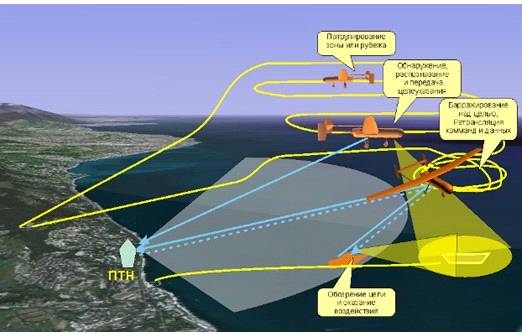
Рисунок 9: Комплексное применение дистанционных
средств разведки.
· совершающий разведывательный полет БЛА обнаруживает цель и по каналу связи с ПТН передает ее координаты на пост управления;
· принимается решение об оказании воздействия;
· в район с заданными координатами направляется дистанционно управляемый катер;
· во время движения катера БЛА продолжает слежение за целью, осуществляя наведение катера;
· достигнув цели, катер осуществляет воздействие на цель с фиксацией координат и времени. Данные в реальном времени транслируются с помощью БЛА на ПТН и на НПУ.
Актуально и использование таких комплексов в борьбе с браконьерами, к примеру, в Астраханских плавнях и в борьбе с наркотрафиком в определенных районах нашей страны.
Наземное оборудование таких комплексов позволяет оператору-дешифровщику производить распознавание целей и выдачу координат найденных объектов с высокой степенью точности. Как использовать полученные координаты решает сам потребитель такой системы.
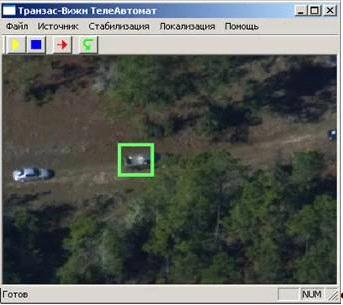
Покажем на примере комплекса дешифратора, разработанного фирмой «Транзас Вижн», как может происходить этот процесс:
Интеллектуальный комплекс дешифровки
изображений
Комплекс предназначен для подключения БЛА, как источника информации, к потребителю.
Комплекс позволяет подключать к потребителю один или несколько БЛА одновременно.
Функции комплекса
Комплекс автоматически выполняет следующие функции:
обработка информации с целью ее визуализации (фото, видео, РСА, телеметрия)
обработка информации с целью получения точного целеуказания
дешифровка изображений
подготовка вариантов формализованных сообщений
выдача потребителю сообщения, выбранного оператором
сохранение поступающей информации в базе данных
запись действий оператора
выдача обработанной информации на любой выбранный
потребителем уровень иерархии
Описание работы комплекса
Визуализация
Комплекс отображает всю информацию в геоинформационной среде Transas Globe, позволяющей просматривать растровые и векторные карты, рельеф, 3D и движущиеся объекты в единой 3D форме в произвольном масштабе (до всей Земли включительно).
Телеметрия
Телеметрические данные отображаются в виде трека БЛА и 3D-модели БЛА (с учетом ее ориентации). Одновременно может отображаться полетное задание БЛА.
Фото
Одиночные фотографии
Одиночные фотографии могут отображаться:
в ракурсе съемки (просмотр в Transas Globe с точки съемки)
в произвольном ракурсе
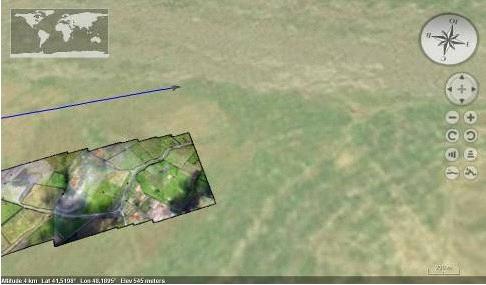
Фотография отображается в ортотрасформированном виде, с учетом рельефа.
При указании пикселя фотографии автоматически вычисляются координаты указанной точки поверхности Земли, с учетом телеметрии, дисторсии камеры и рельефа.
На фотографию могут автоматически налагаться выбранные оператором слои векторной карты.
Группы фотографии
Группы фотографий могут отображаться:
с наложением по исходным или уточненным телеметрическим данным
в виде 3D-карт
(через восстановление 3D)

Видео
Видео может отображаться:
в ракурсе съемки (просмотр на Глобусе с точки съемки)
в произвольном ракурсе
Видео отображается в ортотрасформированном виде, с учетом рельефа.
При указании пикселя видео автоматически вычисляются координаты указанной точки поверхности Земли, с учетом телеметрии, дисторсии камеры и рельефа.
На видео могут автоматически налагаться выбранные
оператором слои векторной карты а также телеметрическая информация.

Точное целеуказание
Для точного целеуказания применяются следующие методы:
сшивка последовательных кадров
подшивка кадра к фотооснове
сшивка карты

Дешифровка изображений
Для дешифровки изображений применяются следующие методы:
Дешифровка фото и отдельных кадров видео
- распознавание с самообучением
фрактальный анализ
спектральный анализ
поиск по особым точкам

Дешифровка видео
- селекция движущихся целей
сопровождение целей

Дешифровка 3D-карт
- распознавание 3D-форм
Подготовка, выбор и выдача формализованных сообщений
При обнаружении искомого объекта на мониторе оператора выводится изображение объекта, информация о нем (тип объекта, координаты, скорость и т.д.) и варианты действий для найденного типа объекта.
При выборе оператором одного из предложенных системой действий автоматически генерируется формализованное сообщение.
Оператор может также сам инициировать выдачу формализованного сообщения, указав на изображении положение и тип объекта.
Документирование
Вся поступающая информация автоматически архивируется в виде, удобном для быстрого просмотра.
ПО комплекса также автоматически фиксирует в БД все действия оператора и все выданные системой формализованные сообщения.
ПО комплекса может также выдавать все или любую часть поступающей или обработанной информации на вышестоящий уровень системы управления для ее отображения и анализа.
Наземное оборудование таких комплексов позволяет оператору-дешифровщику производить распознавание целей и выдачу координат найденных объектов с высокой степенью точности. Как использовать полученные координаты, решает сам потребитель такой системы.
БЛА «Дозор-100» является развитием БЛА «Дозор-85» в направлении увеличения продолжительности и дальности полета.
Удлинённое крыло позволило повысить летное качество планера и, следовательно, уменьшить расход топлива в крейсерском полете. Таким образом, продолжительность полета БЛА «Дозор-100» увеличилась до 10 часов с большим весом полезной нагрузки.
Система выпуска выхлопных газов скрыта внутри фюзеляжа, чем обеспечивается снижение тепловой заметности в полете и уменьшение шума выхлопных газов.