Материал: A7TZrRHEJI
На рис. 4.2 показаны результаты работы программы анализа (сигналы управляемого выпрямителя и их обозначения для исходных данных):
U, B; I, A
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ток нагрузки, А |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ток фазы А |
Ток фазы В |
Ток фазы С |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Интервал перекрытия |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
γ |
|
|
|
|
|
|
|
|
ЭДС фазы А |
|
ЭДС фазы В |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
ЭДС фазы С |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
№ шага |
||||||||
50 |
|
|
100 |
|
|
|
150 |
|
|
200 |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L = 0.01; |
% Индуктивность фазы, Гн |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
Ld = 0.05; |
% Индуктивность нагрузки, Гн |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
R = 2; |
% Сопротивление нагрузки (активное), Ом |
||||||||||||||||||||||||||
f = 50; |
% Частота питающей сети, Гц |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
w = 2*pi*f; |
% Частота питающей сети, 1/с |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
Um = 220*sqrt(2)/sqrt(3); |
% Амплитуда вторичного напряжения при х.х., В |
||||||||||||||||||||||||||
alpha = 10; |
% Угол регулирования (градусы) |
|
|
|
|
|
|
|
|||||||||||||||||||
Текст программы с комментариями в Приложении.
11
5.ОПТИМИЗАЦИЯ ПАРАМЕТРОВ ДИНАМИЧЕСКИХ ЗВЕНЬЕВ
СПРИМЕНЕНИЕМ ПАКЕТА NCD (THE NONLINEAR CONTROL DESIGN BLOCKSET), ВХОДЯЩЕГО В ПАКЕТ SIMULINK
СИСТЕМЫ MATLAB
5.1. Описание пакета NCD
Пакет NCD представляет графический интерфейс пользователя (Graphical User Interface – GUI) проектирования динамических систем во временной области.
С помощью NCD пакета можно найти оптимальные параметры настройки для нелинейной модели системы в SIMULINK, которые обеспечат требуемый переходной процесс по заданным графически ограничениям в окне временной области. Любое число переменных SIMULINK, включая скалярные, векторные и матричные величины, могут быть объявлены настраиваемыми или оптимизируемыми.
Для этого надо ввести имена переменных в соответствующем диалоговом боксе. Границы неопределенности можно задать для любых переменных.
Пакет NCD делает процесс достижения требуемого переходного процесса и оптимизации настраиваемых параметров интуитивным и легким.
Для использования пакета NCD необходимо лишь включить в схему модели SIMULINK специальный NCD блок.
В зависимости от версии MATLAB, он называется Output Constraint, Signal Constraint, NCD Constraint.
Для этого блок соединяют с требуемым сигналом модели, чтобы определить параметры сигнала и ограничения во временной области.
Пакет NCD автоматически преобразует ограничения во временной области в ограничения задачи оптимизации параметров системы, а затем решит задачу, используя алгоритмы и процедуры, заложенные в пакете Optimization.
Задача оптимизации переменных с учетом наложенных ограничений, сформулированная в NCD-пакете, последовательно вызывает симуляцию работы модели системы в SIMULINK, сравнивает полученные результаты с заданными ограничениями переходного процесса и, используя градиентный метод, изменяет настраиваемые параметры для достижения заданной формы процесса.
Пакет NCD позволяет вводить неопределенность в задание динамических параметров объекта управления, проводить симуляцию методом Монте
12
Карло, задавать верхние и нижние границы настраиваемых переменных и изменять критерий достижения цели.
Ход процесса оптимизации можно видеть в графическом окне задания ограничений прямо при выполнении симуляции. По окончанию процесса результаты можно просмотреть в рабочем окне MATLAB. Промежуточные результаты выводятся там после каждого шага симуляции. Оптимизацию параметров можно прервать до ее окончания с целью вывода промежуточных результатов или изменения модели.
Примечание. При использовании блока NCD, например, Output Constraint, применяются последовательные приближения, т. е., если реакция не полностью соответствует заданной, но близка к ней, следует повторить процесс оптимизации.
Параметры предшествующего процесса сохраняются, исходя из них алгоритм может найти более точное решение с минимальными затратами времени и ресурса памяти.
5.2. Настройки блока оптимизации
Настройки осуществляются посредством графического интерфейса оптимизации реакции. Пример: блок Output Constraint (рис. 5.1).
Опция Tuned Parameters позволяет создать список параметров, выбранных пользователем в качестве плана оптимизации модели и задать допустимый диапазон их изменения.
Переменные с соответствующими именами должны присутствовать в модели, а их начальные значения – в рабочем поле workspaсe системы Matlab.
Пункт меню Uncertain Parameters («сомнительные параметры») вызывает список параметров настройки и определяет метод оптимизации при введении в модель неопределенности. Обычно не требуют редактирования и используются по умолчанию.
Goals – формулирование задачи.
Прочие опции можно найти в справочной системе help.
13
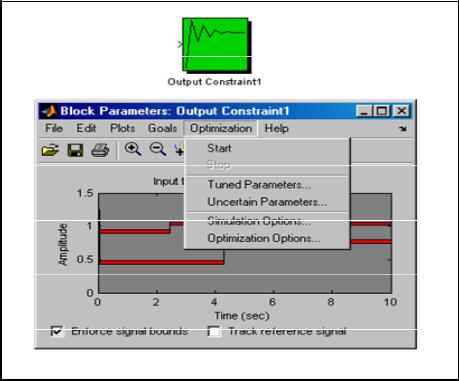
Рис. 5.1
ЗАКЛЮЧЕНИЕ
В учебном пособии представлены математические методы и программные средства анализа и проектирования нелинейных и нестационапных динамических систем.
Учебное пособие может быть использовано при обучении магистрантов, а также в работе специалистов по разработке ЭТК.
На кафедре эдектротехнологической и преобазовательной техники (ЭТПТ) СПбГЭТУ «ЛЭТИ» разработан и включен в учебный процесс лабораторный практикум по данной дисциплине в объеме 108 часов.
В практикум включены примеры, тексты программ, задания для самостоятельной работы магистрантов.
14
Список литературы
1. Васильев А. С. Передаточные функции вентильных преобразователей в системах электропитания при малых возмущениях / А. С. Васильев, П. А. Кошелев // Электричество. – 1985. – № 1.
2.Худяков В. Ф., Хабузов В. А. Моделирование источников вторичного электропитания в среде MATLAB.X: учеб. пособие / Ред.-изд. центр ГУАП.
СПб., 2008.
3.Кошелев П. А., Парамонов С. В., Пшенкин С. Н. Автоматизированное оптимальное проектирование системы управления источником питания для плазменной резки в программах на языке MATLAB // Официальное электронное издание Трудов II Всерос. науч. конф. «Проектирование научных и инженерных приложений в среде MATLAB», (ISBN 5-201-14971- 5). М., 25–26 мая 2004. М.: Изд-во Ин-та проблем управления им. В. А. Трапезникова РАН. С. 988–999.
4.Nelder J. A., Miad R. A Simplex Method for Function Minimisation // The Comp Journal. – № 7. – 1985.– P. 308–313.
5.Герман-Галкин С. Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0: учеб. пособие. – СПб.: КОРОНА принт., 2001.
6.Электронные ресурсы.
http://eelib.narod.ru/toe/Novg_2.01/29/Ct29
http://pers.narod.ru/study/methods/05.html
15