Материал: 2192
|
|
|
|
|
|
|
VA |
|
VA |
48 4,8 |
рад/с. |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
1 |
|
AP1 |
R1 |
10 |
|
||
|
|
|
|
|
|
|
|
|||||
Зная |
расстояние |
от точки |
В |
до мгновенного центра скоростей |
||||||||
(ВР1=R1 |
2 ), определим её скорость: |
|
||||||||||
|
V |
BP V |
|
BP1 |
48 R1 2 |
67,88 см/с. |
||||||
С |
|
1 |
|
1 |
|
A AP |
R |
|
||||
|
B |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
1 |
1 |
|
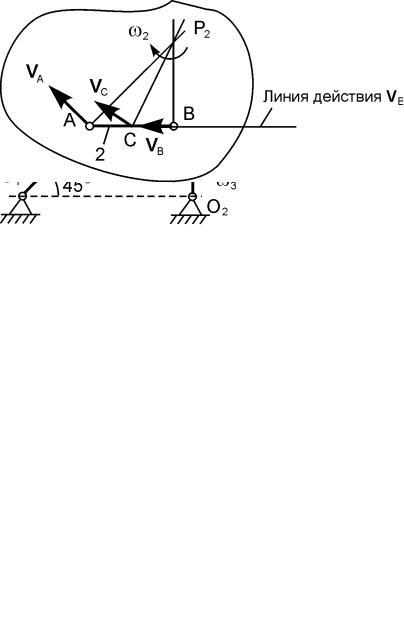
корость VB направлена перпендикулярно отрезку ВР1 в сторону |
||||||||||||
вращен я шестерни 1 вокруг мгновенного центра скоростей. Направление |
||||||||||||
вращен я шестерни |
1 установим, исходя из направления скорости VА, |
|||||||||||
скорости |
скоростью |
относительно мгновенного |
||||||||||
которая |
является |
|
вращательной |
|||||||||
центра скоростей Р1.
Шатун ВС совершает плоское движение. Мгновенный центр |
|||||||
скоростей Р2 шатуна находится в точке пересечения перпендикуляра к |
|||||||
б |
|
||||||
точки |
В, являющегося продолжением отрезка |
P1B, и |
|||||
перпенд куляра к скорости ползуна С, совершающего прямолинейное |
|||||||
движен е вдоль направляющей, наклоненной к горизонту под углом 45º. |
|||||||
Скорости всех точек шатуна являются вращательными вокруг |
|||||||
|
А |
|
|||||
мгновенного центра скоростей |
Р2, |
поэтому |
|
||||
|
VВ= 2 BP2; VС= 2 СP2. |
|
|||||
Из равнобедренного прямоугольного треугольника ВР2С найдём, что |
|||||||
|
ВР2 =СР2=ВС· cos 45º=21,21 cм. |
|
|||||
Тогда VC=VB=67,88 см/с. |
|
|
Д |
||||
Угловую скорость шатуна ВС найдём используя скорость точки В: |
|||||||
|
2 |
VB |
|
67,88 |
3,2 рад/с. |
|
|
|
BP2 |
21,21 |
|
||||
|
|
|
|
|
|||
Вектор скорости точки С направлен перпендикулярно к СР2 |
в сторону |
||||||
|
|
|
|
|
|
И |
|
вращения шатуна ВС вокруг мгновенного центра скоростей Р2. Направление вращения шатуна установим, исходя из направления
скорости точки В, которая является вращательной скоростью относительно мгновенного центра скоростей Р2.
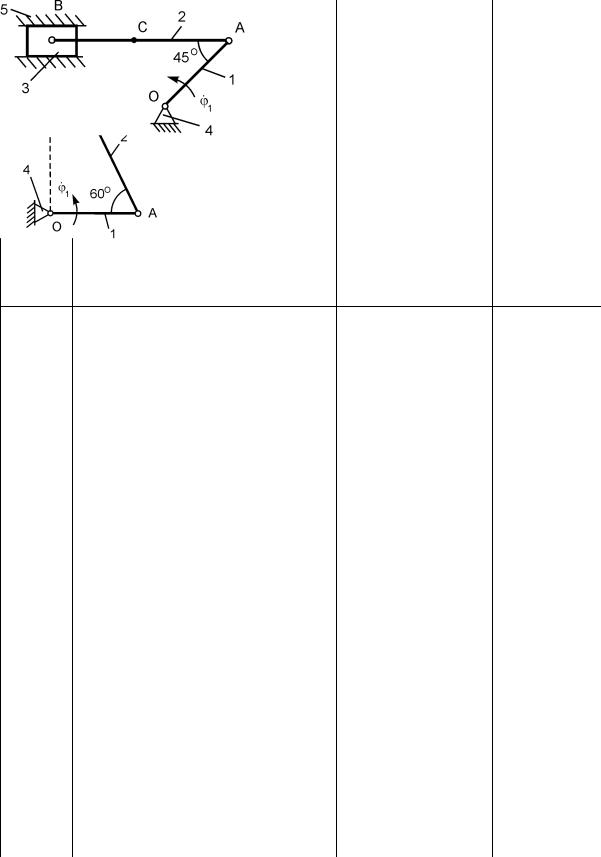
6.2.2. Плоский четырехзвенный механизм
Дано. Схема плоского механизма (рис. 2); модуль угловой скорости ведущего звена 1; ω1 = ωАО = 1 рад/с; геометрические параметры: АВ = О2В = 1 м; АС = СВ = 0,5 м. Определить модули скоростей точек А, В, С и модули ω2, ω3 угловых скоростей звеньев АВ и ВО2 механизма.
71
Решение. Согласно расчётной схеме рассматриваемый механизм состоит из четырех звеньев, обозначенных на рис. 2 позициями 1, 2, 3. Четвертым звеном является рама, на которой крепятся опоры О1 и О2 .
С |
|
|
и |
Рис. 2 |
|
б |
|
|
Звено 1 (АО1) ведущее, остальные ведомые. Звенья совершают |
||
следующ е в ды дв жен й: 1 – вращательное, 2 – плоскопараллельное, 3 – |
||
вращательное. |
|
звену 1, совершающему |
Из услов я пр надлежности точки |
||
вращательное дв жен е, определим модуль скорости VA |
||
А |
||
VA = ωOA·AO1 = ω1·AO1 = ω1·(BO2/sin(45о)) = 1·(1/0,707) = 1,414 м/с.
Рассмотрим отдельно плоскопараллельное движение тела 2 (рис. 3). Вектор скорости VA покажем на рис. 3, как VA ┴ AO1.
Д |
|
Рис. 3 |
И |
|
|
Как известно, условием безаварийной работы механизма является общая скорость в месте контакта звеньев. Исходя из этого, у звена 2 скорость точки А известна.
Точка В, из условия её принадлежности звену 3, описывает окружность, поэтому линия действия скорости VB перпендикулярна ВО2
(VB ┴ BO2).
72

Таким образом, у звена 2 известен вектор VA скорости точки А и линия действия вектора VB.
Так как звено 2 совершает плоскопараллельное движение, то для определения мгновенного центра скоростей (точка Р2) используется первый случай (см. рис. 3).
находится на пересечении перпендикуляров к скоростям точек А и В. По направлению скорости VA точки А определим направление вращения звена 2 относительно оси, проходящей через точку Р2.
Из услов я пр надлежности точки А звену 2, совершающему плоскопараллельное дв жение, справедливо равенство
МЦС |
VA = ω2·AP2, |
|
|
тела 2. |
|
где ω2 – модуль угловой |
|
|
Так как AP2 = AO1 = BO2/sin(45о), то |
||
|
VA = ω2·(BO2/sin(45о)). |
|
Из последнего равенства определим модуль ω2 угловой скорости звена |
||
2скорости |
|
|
ω2 = VA·sin(45о)/BO2 = (1,414·0,707)/1 = 1,000 рад/с.
По известному модулю угловой скорости тела 2 определим модули
скоростей точек В и С: |
|
б |
|
VB = ω2·BP2 = 1·1 = 1, 000 м/с; |
|
VC = ω2·CP2 = ω2· (CB)2 (BP )2 = 1· (0,5)2 (1)2 |
= 1, 118 м/с. |
2 |
|
Из условия принадлежности точки В телу 3, совершающему |
|
А |
|
вращательное движение, справедливо равенство |
|
VB = ω3·BO2,
где ω3 – модуль угловой скорости тела 3.
|
Из этого равенства модуль угловой скорости вращательного движения |
|||||
звена 3 равен |
|
Д |
||||
|
|
|
|
|
||
|
|
ω3 = VB/BO2 = 1/1 = 1,000 рад/с. |
|
|
||
Полученные результаты расчёта вносятся в таблицу 6.1. |
Таблица 6.1 |
|||||
|
|
|
|
|
||
|
|
|
|
И |
||
|
VA, см/с |
VB, см/с |
VC, см/с |
ω2, рад/с |
ω3, рад/с |
|
|
1,414 |
1,000 |
1,118 |
1,000 |
1,000 |
|
Скорости точек А, В, С показаны на рис. 2.
73
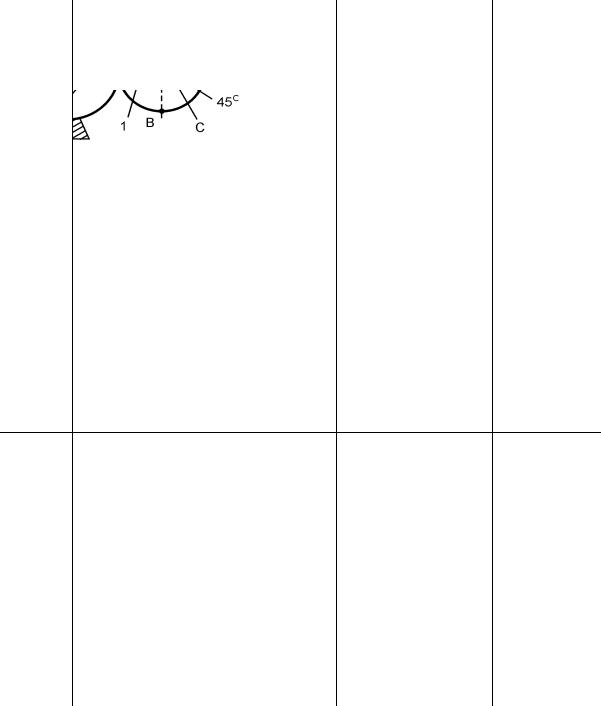
6.3. Варианты расчетно-графической (контрольной) работы «Кинематический анализ плоского механизма»
|
В |
расчетно-графической (контрольной) |
работе |
для расчётного |
|||||||
|
положения плоского механизма требуется найти модули скоростей точек |
||||||||||
|
А, В и и модули угловых скоростей звеньев этого механизма. Схемы |
||||||||||
С |
|
|
|
|
|
|
|
|
|||
|
механизмов и необходимые для расчёта данные приведены в табл. 6.2. |
||||||||||
|
|
|
|
|
|
|
|
|
Таблица 6.2 |
||
|
Номер |
|
|
|
|
Исходные |
|
Определяе |
|
||
|
вариан |
|
Расчётная схема механизма |
|
данные для |
|
мые |
|
|||
|
та |
|
|
|
|
|
расчёта |
|
величины |
|
|
|
1 |
|
|
2 |
|
|
3 |
|
4 |
|
|
|
|
|
б |
|
1 = 1 рад/с; |
|
|
|
|
||
|
|
|
|
|
|
|
VA = ? |
|
|||
|
|
|
|
R2 = 0,4 м; |
|
|
|||||
|
1 |
|
|
|
VB = ? |
|
|||||
|
|
|
|
|
R3 = 0,6 м; |
|
VC = ? |
|
|||
|
и |
|
|
С = 0,2 м |
|
|
= ? |
|
|||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
ОА |
|
VA = ? |
|
||||
|
|
|
|
|
|
1 |
= 1 рад/с; |
|
|
||
|
2 |
|
|
|
|
|
= 0,60 м; |
|
VB = ? |
|
|
|
|
|
|
|
R2 = 0,24 м; |
|
VC = ? |
|
|||
|
|
|
|
|
|
С = 0,12 м |
|
2 |
= ? |
|
|
|
|
|
|
Д |
|
|
|
||||
|
|
|
|
V = ? |
|
||||||
|
|
|
|
|
|
VA = 1 м/с; |
|
B |
|
|
|
|
3 |
|
|
|
|
R = 0,50 м |
|
VC = ? |
|
||
|
|
|
|
|
|
|
|
|
= ? |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
И |
|
|||
|
|
|
|
|
|
|
VA = ? |
|
|||
|
|
|
|
|
|
|
= 1 рад/с; |
|
VB |
= ? |
|
|
4 |
|
|
|
|
1 |
|
VC = ? |
|
||
|
|
|
|
|
ОА = 0,30 м; |
|
|
||||
|
|
|
|
|
|
ВС = 0,10 м |
|
2 |
= ? |
|
|
|
|
|
|
|
|
|
|
|
|
= ? |
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
74
|
|
|
|
|
|
Продолжение табл. 6.2 |
|||
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
|
|
3 |
|
4 |
|
|
|
|
|
|
|
|
|
VA = ? |
|
|
|
|
|
|
|
|
= 1 рад/с; |
VB = ? |
|
|
|
5 |
|
|
|
1 |
VC = ? |
|
||
|
|
|
|
ОА = 0,30 м; |
|
||||
|
и |
|
АС = ВС |
2 |
= ? |
|
|||
С |
|
|
|
|
|
= ? |
|
||
|
|
|
|
3 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
б |
1 |
= 2 рад/с; |
|
|
|
||
|
|
|
|
|
|
|
VA = ? |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
А |
VB = ? |
|
||||
6 |
|
|
|
2 |
= 1 рад/с; |
|
|||
|
|
|
R1 = 0,60 м; |
VC = ? |
|
||||
|
|
|
|
|
R3 = 0,40 м; |
3 |
= ? |
|
|
|
|
|
|
|
С = 0,20 м |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
Д |
|
|
|||
|
|
|
|
|
VA = 1 м/с;; |
VB = ? |
|
||
|
|
|
|
|
VC = ? |
|
|||
7 |
|
|
|
В = 0,60 м; |
1 |
= ? |
|
||
|
|
|
|
|
АС = 0,30 м |
|
|
|
|
|
|
|
|
|
|
И |
|
||
|
|
|
|
|
|
|
2 |
= ? |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
= ? |
|
|
|
|
|
|
1 = 1 рад/с; |
VA = ? |
|
||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
VB = ? |
|
|
|
|
|
|
|
ОА = 0,60 м; |
|
|||
8 |
|
|
|
VC = ? |
|
||||
|
|
|
|
|
АВ = 1,2 м; |
2 |
= ? |
|
|
|
|
|
|
|
АС = ВС |
|
|
|
|
|
|
|
|
|
|
= ? |
|
||
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
75