Материал: 2015 [Тынчеров] Основы автоматизации ТПНП
Глава 1. ОБЩИЕ СВЕДЕНИЯ ОБ АВТОМАТИЧЕСКОМ УПРАВЛЕНИИ ПРОИЗВОДСТВЕННЫМИ ПРОЦЕССАМИ, КЛАССИФИКАЦИЯ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ (САР)
1.1. Основные понятия и определения теории автоматического регулирования
Известно [42], что технический процесс характеризуется совокупностью данных, величин, показателей. Совокупность операций для пуска, остановки процесса, поддержания постоянства показателей процесса или изменения их по заданному закону называется управле-
нием.
Поддержание показателей на заданном уровне или изменение их по заданному закону, называется регулированием, т. е. регулирование
— это часть управления. И если эти процессы управления осуществляются без участия человека (оператора), то они называются авто-
матическими.
Устройство, осуществляющее технологический процесс, показатели которого нужно управлять или регулировать, называется объектом управления, или управляемым объектом. Объектами управления могут быть буровой насос, буровой станок, привод бурового станка и т. д. или отдельные их узлы, выполняющие те или иные операции технологического процесса, например, лебедка бурового станка.
Техническое устройство, осуществляющее управление в соответствии с программой (алгоритмом), называется автоматическим управляющим устройством.
Совокупность объекта управления и управляющего устройства называется системой автоматического управления (САУ).
Нас интересуют не все операции автоматического управления, а только регулирование, т. е. те операции, которые относятся к поддержанию или изменению показателей процесса.
Всякий процесс регулирования может вестись:
без контроля результата — регулирование по разомкнутому
циклу;
с контролем результата — регулирование по замкнутому цик-
лу.
Примером регулирования по разомкнутому циклу без контроля
результата (расхода Q) может служить стабилизация подачи промывочной жидкости Q при работе поршневого насоса на полную производительность при включении соответствующей скорости коробки перемены передач (нерегулируемый привод и нет сброса промывочной жидкости). Здесь при значительных (неаварийных) изменениях характеристики гидравлического тракта (по причине зашламования забойной части, вывалов кусочков породы со стенок скважины и т. п.) расход промывочной жидкости остается постоянным.
В приведенном примере объектом управления является буровой насос с нерегулируемым приводом (насосная установка). Управляющим (регулирующим) органом, который должен содержать объект для осуществления управления подачей промывочной жидкости, является коробка перемены передач.
Регулирование по разомкнутому циклу применяется значительно реже, чем регулирование по замкнутому циклу, в силу нестабильности характеристик элементов. Элементы системы подвержены различного рода возмущениям. В приведенном примере это может быть изменение коэффициента заполнения цилиндров насоса по причине изменения параметров промывочной жидкости или всасывающего тракта.
Рассмотрим пример регулирования по замкнутому циклу с кон-
тролем результата — расхода Q. На рисунке 1.1 приведена структурная схема регулятора (стабилизатора) расхода промывочной жидкости Q. Здесь расход Q контролируется датчиком расхода ДР. Задатчиком З посредством регулировки напряжения Uзад устанавливается требуемый расход Q. Частота оборотов вала двигателя n (следовательно, и расход Q) определяется нагрузкой и напряжением Uг, которое зависит от значения ∆U.
∆U = Uзад – Uос1, (1.1)
где Uос1 — напряжение на выходе датчика (Uд), пропорциональное расходу Q, и называется напряжением обратной связи. И эта связь в данном случае отрицательная (условно обозначается закрашиванием сектора): уменьшает значение Uзад. При отклонении расхода Q от заданного значения изменяется и Uос1, что приводит к изменению n и тем самым к восстановлению расхода Q.
Автоматическое поддержание заданного закона изменения показателей процесса с помощью обратной связи называется автоматическим регулированием. В рассмотренном примере один показатель
— Q. И он называется регулируемой величиной.
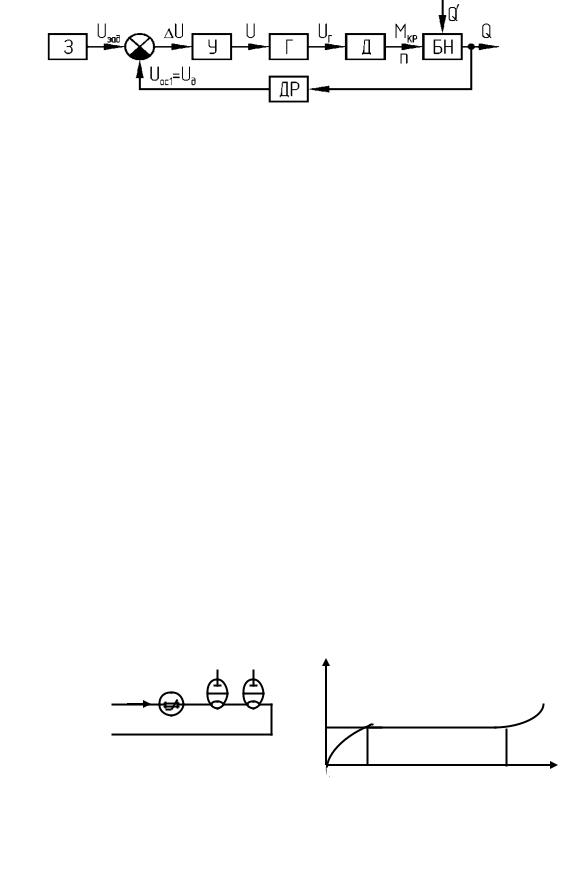
Рис. 1.1 — Структура автоматического регулятора (стабилизатора) расхода промывочной жидкости:
Г — генератор, Д — двигатель, З — задатчик, У — усилитель, БН — буровой насос, ДР — датчик расхода (звено обратной связи), Q — производительность насоса (интенсивность промывки)
Итак, основываясь на рассмотренном примере, будем считать, что автоматическое устройство, которое осуществляет автоматическое регулирование, называется автоматическим регулятором.
В свою очередь, управляемый регулятором объект называется ре-
гулируемым объектом.
Совокупность регулируемого объекта и автоматического регуля-
тора составляют систему автоматического регулирования (САР).
По функциональному назначению автоматические системы подразделяются на разомкнутые системы автоматического управления, замкнутые системы автоматического управления и системы автоматического контроля.
Рассмотрим примеры, демонстрирующие работу рассмотренных схем.
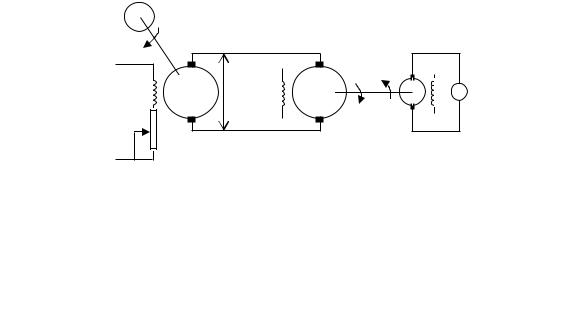
Пример 1. Стабилизатор тока накала электронных ламп (рис. 1.2). Схема демонстрирует регулирование по разомкнутому циклу.
|
а) |
ЭЛ |
IН |
б) |
|
|
Б |
|
|
|
ø |
IН |
|
|
~ UС |
|
|
|
|
ø |
|
|
|
|
|
|
|
|
U1 |
U2 UС |
Рис. 1.2 — Электрическая схема стабилизатора тока (а)
инелинейная характеристика бареттера (б):
Б— бареттер, ЭЛ — электронные лампы
Поддержание постоянства тока накала IН происходит без участия оператора. Вывод: контроль не выполняется.
Пример 2. Ручное регулирование частоты вращения ω вала электрического двигателя (рис. 1.3).
|
|
вд |
ωВД |
|
|
|
|
+ |
ø |
|
_ |
ø |
|
|
+ø |
|
|
мС |
|
||||
|
|
|
|
|
|
||
|
ОВГ |
Г |
|
Д |
тг |
V |
|
|
UГ |
|
ω |
|
|
||
|
|
|
ø |
|
-ø |
||
|
|
Р |
+ |
|
|
|
|
_ |
|
|
ОВД |
|
|
|
|
ø |
• |
|
|
|
|
||
|
|
|
|
|
|||
Рис. 1.3 — Электрическая схема ручного регулирования частоты вращения вала двигателя: Г — генератор, ОВГ — обмотка возбуждения генератора, ВД — вспомоательный двигатель, Д — двигатель,
ОВД — обмотка возбуждения двигателя, ТГ — тахогенератор, V — вольтметр, Р — реостат
Частота вращения ω вала приводного двигателя Д является функцией напряжения на клеммах генератора Uг, которое при постоянной частоте вращения якоря (ωВД = const) определяется током в обмотке возбуждения ОВГ генератора. Для регулирования или поддержания постоянства частоты вращения ω оператор следит за показаниями вольтметра V, проградуированного в размерностях частоты вращения ω и, меняя вручную реостатом Р ток Iовг в обмотке возбуждения, добивается требуемого значения ω.
Налицо замкнутая система регулирования. Однако такая система ручного регулирования обладает значительным недостатком: малая точность регулирования и нежелательное наличие оператора. Кроме того, действует ряд возмущающих воздействий: меняющийся момент на валу двигателя МС, изменение температуры среды, износ щеток электрических машин и т. д. Выводы: неточности в системе регулирования; система не применима при быстро протекающих процессах.
Рассмотренные примеры позволяют подвести базу для изучения принципов регулирования [42, 43].
1.1.1. Принципы регулирования
При работе рассмотренных выше систем становится очевидным воздействие внешних факторов (возмущающих воздействий). Самым простым решением для учета каждого возмущающего воздействия является установка соответствующего датчика. Однако данный под-
ход не всегда реализуем. В качестве выхода из создавшегося положения обычно применяют приемы, в соответствии с которыми сначала измеряют отклонение от заданной величины с установкой датчика, а затем по измеренному отклонению вводят поправку (аналогично примеру с изменением положения движка реостата Р).
Различают следующие основные принципы регулирования [42]:
по отклонению;
по возмущению;
компенсации;
комбинированный.
Рисунок 1.4 иллюстрирует схему автоматического регулирования (стабилизации) частоты оборотов вала двигателя с использованием одного датчика контроля за отклонением частоты оборотов от заданного значения, в качестве которого выступает тахогенератор.
Эта схема, по сути, является трансформацией схемы ручного регулирования (рис. 1.3) в схему автоматического регулирования (рис. 1.4). Здесь оператор заменен электрической системой контроля и системой воздействия на реостат Р. В схему введены реостаты Р1 и Р2, реверсивный двигатель РД, электронный усилитель ЭУ и редуктор Ред, который механически связан с движком реостата Р.
Рассмотрим основные регулирующие элементы (рис. 1.4):
объект регулирования, в качестве которого выступает двигатель, причем все остальные элементы входят в регулятор системы;
показатель процесса регулирования, в качестве которого выступает угловая скорость ω, т. е. регулируемая величина, которая может быть как постоянной, так и меняться в соответствии с каким-либо законом;
регулирующий орган, роль которого играет якорная цепь двигателя, меняя положение или состояние которой, можно изменять регулируемую величину;
регулирующее воздействие — напряжение в якорной цепи двигателя;
задающая величина (воздействие) системы — Uзад; т. е. это такая величина, которая пропорциональна или функционально связана
срегулируемой величиной и служит для изменения уровня послед-
ней; через Uзад задается конкретное значение ω.
Если ∆U = Uзад – Uос = 0, то наступит состояние равновесия. Uос
— это напряжение обратной связи, которое пропорционально регулируемой величине ω. При изменении ω (по причине изменения момен-